/*
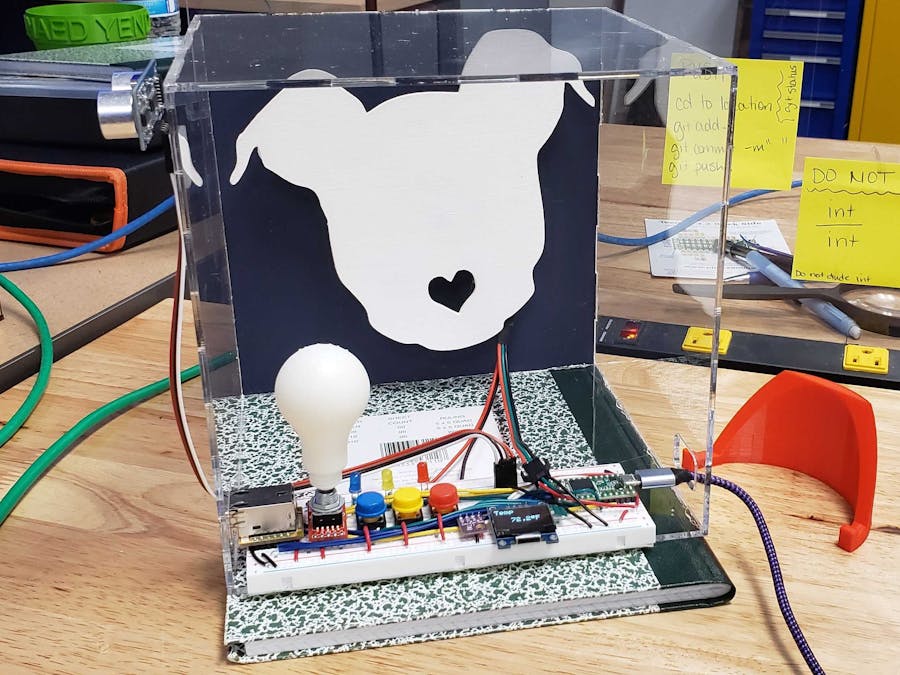
* Project: Midterm Project
* Description: Smart Room Controller
* Author: Janel Sanchez
* Date: 02-Nov-2020
*/
#include <SPI.h>
#include <Ethernet.h>
#include <Encoder.h>
#include <mac.h>
#include <hue.h>
#include <Adafruit_NeoPixel.h>
#include <colors.h>
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#include <Adafruit_BME280.h>
#include "Wemo.h"
EthernetClient client;
Adafruit_BME280 bme;
// Declare Bools
bool status;
bool lastUltra;
bool roomOccupied;
// Declare Constants
const int echoPin=1; // attach digital pin Echo of HC-SR04
const int trigPin=0; //attach digital pin Trig of HC-SR04
const int nssPin=10; //attach pin nSS of Ethernet
const int pixelPin=20; //attch digital pin DI of Pixel strip
const int pixelCount=60;
const int pinA=2;
const int pinB=3;
const int encGreen=23;
const int buttonPinBlue = 14;
const int ledPinBlue = 6;
const int buttonPinYellow = 15;
const int ledPinYellow = 7;
const int buttonPinRed = 16;
const int ledPinRed = 8;
Wemo wemo;
// Declare Variables
int ultraState; // variable for the distance measurement
Adafruit_NeoPixel pixel(pixelCount, pixelPin, NEO_GRB + NEO_KHZ800);
Encoder myEnc(pinA,pinB);
#define SCREEN_WIDTH 128 // OLED display width, in pixels
#define SCREEN_HEIGHT 64 // OLED display height, in pixels
#define OLED_RESET 22 // Reset pin # (or -1 if sharing Arduino reset pin)(Use pin not in use)
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
float tempC;
float tempF = 0;
void setup() {
pinMode(nssPin, OUTPUT); //Sets the nssPin as an OUTPUT
pinMode(trigPin, OUTPUT); // Sets the trigPin as an OUTPUT
pinMode(echoPin, INPUT); // Sets the echoPin as an INPUT
pinMode(encGreen,OUTPUT);
digitalWrite(encGreen,LOW);
pinMode (buttonPinBlue,INPUT);
pinMode (ledPinBlue, OUTPUT);
pinMode (buttonPinYellow,INPUT);
pinMode (ledPinYellow, OUTPUT);
pinMode (buttonPinRed,INPUT);
pinMode (ledPinRed, OUTPUT);
Serial.begin(9600);
delay(100); // wait for Serial Monitor to Open
Serial.println("Starting my AMAZING Smart Room Controller Project Program");
//Start ethernet connection
status = Ethernet.begin(mac);
if (!status) {
Serial.println("Failed to configure Ethernet using DHCP");
//no point in continueing
while(1);
}
//print your local IP address
Serial.print("My IP address:");
for (byte thisbyte = 0; thisbyte < 4; thisbyte++) {
//print value of each byte of the IP address
Serial.print(Ethernet.localIP()[thisbyte], DEC);
if (thisbyte < 3) Serial.print(".");
}
Serial.println();
myEnc.write(95);
pixel.begin();
pixel.show();
status = bme.begin(0x76);
if(!status) {
Serial.println("Initialization Failed");
}
// SSD1306_SWITCHCAPVCC = generate display voltage from 3.3V internally
if(!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) { // Address 0x3C for 128x32
Serial.println(F("SSD1306 allocation failed"));
for(;;); // Don't proceed, loop forever
}
// Show initial display buffer contents on the screen --
// the library initializes this with an Adafruit splash screen.
display.display();
delay(2000); // Pause for 2 seconds
// Clear the buffer
display.clearDisplay();
// Show the display buffer on the screen. You MUST call display() after
// drawing commands to make them visible on screen!
display.display();
delay(2000);
}
void loop() {
ultraState=ultra();
if(ultraState!=lastUltra) {
if(ultraState == true) {
roomOccupied = !roomOccupied;
}
lastUltra=ultraState;
}
digitalWrite(encGreen,!roomOccupied);
hue(roomOccupied);
pixels(!roomOccupied);
if(roomOccupied == true) {
Serial.println("SOMEONE IS IN THE ROOM");
displaybmevalues(); // display the BME values
}
else {
Serial.println("NO ONE IS IN THE ROOM");
display.clearDisplay();
display.display();
}
tempC = bme.readTemperature();
tempF = (tempC*1.8)+32;
buttons();
}
bool ultra() {
int duration;
int distance;
delay(1000); // Execute once per second
// Clears the trigPin condition
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin HIGH (ACTIVE) for 10 microseconds, this is the pulse that will be detected
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = duration * 0.034 / 2; // Speed of sound wave divided by 2 (go and back)
Serial.printf("Time %i, Distance: %i, Duration %i \n",millis(),distance, duration);
if(distance<100) {
return true;
}
else {
return false;
}
}
void hue(bool hueState) {
int i;
int HueBright;
HueBright=encBrightness();
for(i=1;i<=5;i++) {
setHue(i,hueState,HueYellow,HueBright);
Serial.printf("HueOn is %i, For Bulb %i \n",hueState,i);
}
}
void pixels(bool pixelState) {
int j;
int redPixel;
int pix;
int color;
for(redPixel=0; redPixel<pixelCount; redPixel=redPixel+7) {
for(j=0; j<7; j++) {
pix = redPixel+j;
color = pixelState*rainbow[j];
pixel.setPixelColor(pix,color);
pixel.setBrightness(15);
pixel.show();
}
}
}
int encBrightness() {
int encPosition;
int encBright;
encPosition=myEnc.read();
if(encPosition>95) {
myEnc.write(95);
}
if(encPosition<0) {
myEnc.write(0);
}
encBright=map(encPosition,0,95,0,255);
return encBright;
}
void displaybmevalues() {
Serial.printf("Display to the Display \n");
const char degreeSymbol=247;
display.clearDisplay();
display.setTextSize(2); // Normal 1:1 pixel scale
display.setTextColor(SSD1306_WHITE); // Draw white text
display.setCursor(0,0); // Start at top-left corner
display.printf("Temp \n \n %0.1f%cF \n", tempF,degreeSymbol);
display.display();
}
void buttons() {
static bool lastButtonBlue;
static bool lastButtonYellow;
static bool lastButtonRed;
bool buttonStateBlue;
bool buttonStateYellow;
bool buttonStateRed;
static bool wemoStateBlue;
static bool wemoStateYellow;
static bool wemoStateRed;
// BLUE BUTTON
buttonStateBlue=digitalRead(buttonPinBlue);
if(buttonStateBlue!=lastButtonBlue) {
if(buttonStateBlue == HIGH) {
wemoStateBlue = !wemoStateBlue;
digitalWrite(ledPinBlue,HIGH);
Serial.printf("Blue Button/LED is ON \n");
}
lastButtonBlue=buttonStateBlue;
}
if(wemoStateBlue == HIGH) {
wemo.switchON(3);
Serial.printf("Wemo 3 is ON \n");
}
else {
wemo.switchOFF(3);
digitalWrite(ledPinBlue,LOW);
}
// YELLOW BUTTON
buttonStateYellow=digitalRead(buttonPinYellow);
if(buttonStateYellow!=lastButtonYellow) {
if(buttonStateYellow == HIGH) {
wemoStateYellow = !wemoStateYellow;
digitalWrite(ledPinYellow,HIGH);
Serial.printf("Yellow Button/LED is ON \n");
}
lastButtonYellow=buttonStateYellow;
}
if(wemoStateYellow == HIGH) {
wemo.switchON(2);
Serial.printf("Wemo 2 is ON \n");
}
else {
wemo.switchOFF(2);
digitalWrite(ledPinYellow,LOW);
}
// RED BUTTON
buttonStateRed=digitalRead(buttonPinRed);
if(buttonStateRed!=lastButtonRed) {
if(buttonStateRed == HIGH) {
wemoStateRed = !wemoStateRed;
digitalWrite(ledPinRed,HIGH);
Serial.printf("Red Button/LED is ON \n");
}
lastButtonRed=buttonStateRed;
}
if(wemoStateRed == HIGH) {
wemo.switchON(1);
Serial.printf("Wemo 1 is ON \n");
}
else {
wemo.switchOFF(1);
digitalWrite(ledPinRed,LOW);
}
}




















_IHYK2AHej1.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)



_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)

{kind=link}
{kind=link}
Comments