#include <Wire.h>
#include <avr/interrupt.h>
#include <avr/pgmspace.h>
#include <SoftwareSerial.h>
#include <Adafruit_MLX90614.h>
#include "MAX30105.h"
#include "heartRate.h"
#include "RTCDS1307.h"
#include <EEPROM.h>
#define MPU_ADDR 0x68
#define MEM_START_ADDR 0x6E
#define MEM_R_W 0x6F
#define Min_Time_Short_Push_Button 2
#define Min_Time_Long_Push_Button 15
#define MAX_COUNTER 0xFFFF
#define Buttons_FREQUENCY 64
#define Buttons_FREQUENCY_READ_PER_CYCLE cpt%((MAX_COUNTER/Buttons_FREQUENCY)+1)
#define MAX30105_FREQUENCY 64
#define MAX30105_FREQUENCY_READ_PER_CYCLE cpt%((MAX_COUNTER/MAX30105_FREQUENCY)+1)
#define MLX90614_FREQUENCY 1
#define MLX90614_FREQUENCY_READ_PER_CYCLE cpt%((MAX_COUNTER/MLX90614_FREQUENCY)+1)
#define MPU6050_FREQUENCY 128
#define MPU6050_FREQUENCY_READ_PER_CYCLE cpt%((MAX_COUNTER/MPU6050_FREQUENCY)+1)
#define DS1307_FREQUENCY 1
#define DS1307_FREQUENCY_READ_PER_CYCLE cpt%((MAX_COUNTER/DS1307_FREQUENCY)+1)
#define HC06_FREQUENCY 128
#define HC06_FREQUENCY_READ_PER_CYCLE cpt%((MAX_COUNTER/HC06_FREQUENCY)+1)
#define Serial_FREQUENCY 128
#define Serial_FREQUENCY_READ_PER_CYCLE cpt%((MAX_COUNTER/Serial_FREQUENCY)+1)
#define DimLED_FREQUENCY 64
#define DimLED_FREQUENCY_READ_PER_CYCLE cpt%((MAX_COUNTER/DimLED_FREQUENCY)+1)
#define DebugLED_FREQUENCY 1
#define DebugLED_FREQUENCY_READ_PER_CYCLE cpt%((MAX_COUNTER/DebugLED_FREQUENCY)+1)
long lastRead = 0;
byte processed_packet[8];
byte received_packet[50];
byte temp = 0;
byte fifoCountL = 0;
byte fifoCountL2 = 0;
byte packetCount = 0x00;
boolean longPacket = false;
boolean firstPacket = true;
float q[4];
//This 3D array contains the default DMP memory bank binary that gets loaded during initialization.
//In the Invensense UC3-A3 firmware this is uploaded in 128 byte tranmissions, but the Arduino Wire
//library only supports 32 byte transmissions, including the register address to which you're writing,
//so I broke it up into 16 byte transmission payloads which are sent in the dmp_init() function below.
//
//This was reconstructed from observed I2C traffic generated by the UC3-A3 demo code, and not extracted
//directly from that code. That is true of all transmissions in this sketch, and any documentation has
//been added after the fact by referencing the Invensense code.
// this tab takes 6% of memory program storage
unsigned const char dmpMem[8][16][16] PROGMEM = {
{
{0xFB, 0x00, 0x00, 0x3E, 0x00, 0x0B, 0x00, 0x36, 0x00, 0x01, 0x00, 0x02, 0x00, 0x03, 0x00, 0x00},
{0x00, 0x65, 0x00, 0x54, 0xFF, 0xEF, 0x00, 0x00, 0xFA, 0x80, 0x00, 0x0B, 0x12, 0x82, 0x00, 0x01},
{0x00, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x28, 0x00, 0x00, 0xFF, 0xFF, 0x45, 0x81, 0xFF, 0xFF, 0xFA, 0x72, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x03, 0xE8, 0x00, 0x00, 0x00, 0x01, 0x00, 0x01, 0x7F, 0xFF, 0xFF, 0xFE, 0x80, 0x01},
{0x00, 0x1B, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x3E, 0x03, 0x30, 0x40, 0x00, 0x00, 0x00, 0x02, 0xCA, 0xE3, 0x09, 0x3E, 0x80, 0x00, 0x00},
{0x20, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00, 0x60, 0x00, 0x00, 0x00},
{0x41, 0xFF, 0x00, 0x00, 0x00, 0x00, 0x0B, 0x2A, 0x00, 0x00, 0x16, 0x55, 0x00, 0x00, 0x21, 0x82},
{0xFD, 0x87, 0x26, 0x50, 0xFD, 0x80, 0x00, 0x00, 0x00, 0x1F, 0x00, 0x00, 0x00, 0x05, 0x80, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x02, 0x00, 0x00, 0x00, 0x03, 0x00, 0x00},
{0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x04, 0x6F, 0x00, 0x02, 0x65, 0x32, 0x00, 0x00, 0x5E, 0xC0},
{0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0xFB, 0x8C, 0x6F, 0x5D, 0xFD, 0x5D, 0x08, 0xD9, 0x00, 0x7C, 0x73, 0x3B, 0x00, 0x6C, 0x12, 0xCC},
{0x32, 0x00, 0x13, 0x9D, 0x32, 0x00, 0xD0, 0xD6, 0x32, 0x00, 0x08, 0x00, 0x40, 0x00, 0x01, 0xF4},
{0xFF, 0xE6, 0x80, 0x79, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0xD0, 0xD6, 0x00, 0x00, 0x27, 0x10}
},
{
{0xFB, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x00, 0x01, 0x00, 0x00, 0x00},
{0x00, 0x00, 0xFA, 0x36, 0xFF, 0xBC, 0x30, 0x8E, 0x00, 0x05, 0xFB, 0xF0, 0xFF, 0xD9, 0x5B, 0xC8},
{0xFF, 0xD0, 0x9A, 0xBE, 0x00, 0x00, 0x10, 0xA9, 0xFF, 0xF4, 0x1E, 0xB2, 0x00, 0xCE, 0xBB, 0xF7},
{0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x04, 0x00, 0x02, 0x00, 0x02, 0x02, 0x00, 0x00, 0x0C},
{0xFF, 0xC2, 0x80, 0x00, 0x00, 0x01, 0x80, 0x00, 0x00, 0xCF, 0x80, 0x00, 0x40, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x06, 0x00, 0x00, 0x00, 0x00, 0x14},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x03, 0x3F, 0x68, 0xB6, 0x79, 0x35, 0x28, 0xBC, 0xC6, 0x7E, 0xD1, 0x6C},
{0x80, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0xB2, 0x6A, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3F, 0xF0, 0x00, 0x00, 0x00, 0x30},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x25, 0x4D, 0x00, 0x2F, 0x70, 0x6D, 0x00, 0x00, 0x05, 0xAE, 0x00, 0x0C, 0x02, 0xD0}
},
{
{0x00, 0x00, 0x00, 0x00, 0x00, 0x65, 0x00, 0x54, 0xFF, 0xEF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x01, 0x00, 0x00, 0x44, 0x00, 0x00, 0x00, 0x00, 0x0C, 0x00, 0x00, 0x00, 0x01, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x65, 0x00, 0x00, 0x00, 0x54, 0x00, 0x00, 0xFF, 0xEF, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x1B, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00},
{0x00, 0x1B, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00}
},
{
{0xD8, 0xDC, 0xBA, 0xA2, 0xF1, 0xDE, 0xB2, 0xB8, 0xB4, 0xA8, 0x81, 0x91, 0xF7, 0x4A, 0x90, 0x7F},
{0x91, 0x6A, 0xF3, 0xF9, 0xDB, 0xA8, 0xF9, 0xB0, 0xBA, 0xA0, 0x80, 0xF2, 0xCE, 0x81, 0xF3, 0xC2},
{0xF1, 0xC1, 0xF2, 0xC3, 0xF3, 0xCC, 0xA2, 0xB2, 0x80, 0xF1, 0xC6, 0xD8, 0x80, 0xBA, 0xA7, 0xDF},
{0xDF, 0xDF, 0xF2, 0xA7, 0xC3, 0xCB, 0xC5, 0xB6, 0xF0, 0x87, 0xA2, 0x94, 0x24, 0x48, 0x70, 0x3C},
{0x95, 0x40, 0x68, 0x34, 0x58, 0x9B, 0x78, 0xA2, 0xF1, 0x83, 0x92, 0x2D, 0x55, 0x7D, 0xD8, 0xB1},
{0xB4, 0xB8, 0xA1, 0xD0, 0x91, 0x80, 0xF2, 0x70, 0xF3, 0x70, 0xF2, 0x7C, 0x80, 0xA8, 0xF1, 0x01},
{0xB0, 0x98, 0x87, 0xD9, 0x43, 0xD8, 0x86, 0xC9, 0x88, 0xBA, 0xA1, 0xF2, 0x0E, 0xB8, 0x97, 0x80},
{0xF1, 0xA9, 0xDF, 0xDF, 0xDF, 0xAA, 0xDF, 0xDF, 0xDF, 0xF2, 0xAA, 0xC5, 0xCD, 0xC7, 0xA9, 0x0C},
{0xC9, 0x2C, 0x97, 0x97, 0x97, 0x97, 0xF1, 0xA9, 0x89, 0x26, 0x46, 0x66, 0xB0, 0xB4, 0xBA, 0x80},
{0xAC, 0xDE, 0xF2, 0xCA, 0xF1, 0xB2, 0x8C, 0x02, 0xA9, 0xB6, 0x98, 0x00, 0x89, 0x0E, 0x16, 0x1E},
{0xB8, 0xA9, 0xB4, 0x99, 0x2C, 0x54, 0x7C, 0xB0, 0x8A, 0xA8, 0x96, 0x36, 0x56, 0x76, 0xF1, 0xB9},
{0xAF, 0xB4, 0xB0, 0x83, 0xC0, 0xB8, 0xA8, 0x97, 0x11, 0xB1, 0x8F, 0x98, 0xB9, 0xAF, 0xF0, 0x24},
{0x08, 0x44, 0x10, 0x64, 0x18, 0xF1, 0xA3, 0x29, 0x55, 0x7D, 0xAF, 0x83, 0xB5, 0x93, 0xAF, 0xF0},
{0x00, 0x28, 0x50, 0xF1, 0xA3, 0x86, 0x9F, 0x61, 0xA6, 0xDA, 0xDE, 0xDF, 0xD9, 0xFA, 0xA3, 0x86},
{0x96, 0xDB, 0x31, 0xA6, 0xD9, 0xF8, 0xDF, 0xBA, 0xA6, 0x8F, 0xC2, 0xC5, 0xC7, 0xB2, 0x8C, 0xC1},
{0xB8, 0xA2, 0xDF, 0xDF, 0xDF, 0xA3, 0xDF, 0xDF, 0xDF, 0xD8, 0xD8, 0xF1, 0xB8, 0xA8, 0xB2, 0x86}
},
{
{0xB4, 0x98, 0x0D, 0x35, 0x5D, 0xB8, 0xAA, 0x98, 0xB0, 0x87, 0x2D, 0x35, 0x3D, 0xB2, 0xB6, 0xBA},
{0xAF, 0x8C, 0x96, 0x19, 0x8F, 0x9F, 0xA7, 0x0E, 0x16, 0x1E, 0xB4, 0x9A, 0xB8, 0xAA, 0x87, 0x2C},
{0x54, 0x7C, 0xB9, 0xA3, 0xDE, 0xDF, 0xDF, 0xA3, 0xB1, 0x80, 0xF2, 0xC4, 0xCD, 0xC9, 0xF1, 0xB8},
{0xA9, 0xB4, 0x99, 0x83, 0x0D, 0x35, 0x5D, 0x89, 0xB9, 0xA3, 0x2D, 0x55, 0x7D, 0xB5, 0x93, 0xA3},
{0x0E, 0x16, 0x1E, 0xA9, 0x2C, 0x54, 0x7C, 0xB8, 0xB4, 0xB0, 0xF1, 0x97, 0x83, 0xA8, 0x11, 0x84},
{0xA5, 0x09, 0x98, 0xA3, 0x83, 0xF0, 0xDA, 0x24, 0x08, 0x44, 0x10, 0x64, 0x18, 0xD8, 0xF1, 0xA5},
{0x29, 0x55, 0x7D, 0xA5, 0x85, 0x95, 0x02, 0x1A, 0x2E, 0x3A, 0x56, 0x5A, 0x40, 0x48, 0xF9, 0xF3},
{0xA3, 0xD9, 0xF8, 0xF0, 0x98, 0x83, 0x24, 0x08, 0x44, 0x10, 0x64, 0x18, 0x97, 0x82, 0xA8, 0xF1},
{0x11, 0xF0, 0x98, 0xA2, 0x24, 0x08, 0x44, 0x10, 0x64, 0x18, 0xDA, 0xF3, 0xDE, 0xD8, 0x83, 0xA5},
{0x94, 0x01, 0xD9, 0xA3, 0x02, 0xF1, 0xA2, 0xC3, 0xC5, 0xC7, 0xD8, 0xF1, 0x84, 0x92, 0xA2, 0x4D},
{0xDA, 0x2A, 0xD8, 0x48, 0x69, 0xD9, 0x2A, 0xD8, 0x68, 0x55, 0xDA, 0x32, 0xD8, 0x50, 0x71, 0xD9},
{0x32, 0xD8, 0x70, 0x5D, 0xDA, 0x3A, 0xD8, 0x58, 0x79, 0xD9, 0x3A, 0xD8, 0x78, 0x93, 0xA3, 0x4D},
{0xDA, 0x2A, 0xD8, 0x48, 0x69, 0xD9, 0x2A, 0xD8, 0x68, 0x55, 0xDA, 0x32, 0xD8, 0x50, 0x71, 0xD9},
{0x32, 0xD8, 0x70, 0x5D, 0xDA, 0x3A, 0xD8, 0x58, 0x79, 0xD9, 0x3A, 0xD8, 0x78, 0xA8, 0x8A, 0x9A},
{0xF0, 0x28, 0x50, 0x78, 0x9E, 0xF3, 0x88, 0x18, 0xF1, 0x9F, 0x1D, 0x98, 0xA8, 0xD9, 0x08, 0xD8},
{0xC8, 0x9F, 0x12, 0x9E, 0xF3, 0x15, 0xA8, 0xDA, 0x12, 0x10, 0xD8, 0xF1, 0xAF, 0xC8, 0x97, 0x87}
},
{
{0x34, 0xB5, 0xB9, 0x94, 0xA4, 0x21, 0xF3, 0xD9, 0x22, 0xD8, 0xF2, 0x2D, 0xF3, 0xD9, 0x2A, 0xD8},
{0xF2, 0x35, 0xF3, 0xD9, 0x32, 0xD8, 0x81, 0xA4, 0x60, 0x60, 0x61, 0xD9, 0x61, 0xD8, 0x6C, 0x68},
{0x69, 0xD9, 0x69, 0xD8, 0x74, 0x70, 0x71, 0xD9, 0x71, 0xD8, 0xB1, 0xA3, 0x84, 0x19, 0x3D, 0x5D},
{0xA3, 0x83, 0x1A, 0x3E, 0x5E, 0x93, 0x10, 0x30, 0x81, 0x10, 0x11, 0xB8, 0xB0, 0xAF, 0x8F, 0x94},
{0xF2, 0xDA, 0x3E, 0xD8, 0xB4, 0x9A, 0xA8, 0x87, 0x29, 0xDA, 0xF8, 0xD8, 0x87, 0x9A, 0x35, 0xDA},
{0xF8, 0xD8, 0x87, 0x9A, 0x3D, 0xDA, 0xF8, 0xD8, 0xB1, 0xB9, 0xA4, 0x98, 0x85, 0x02, 0x2E, 0x56},
{0xA5, 0x81, 0x00, 0x0C, 0x14, 0xA3, 0x97, 0xB0, 0x8A, 0xF1, 0x2D, 0xD9, 0x28, 0xD8, 0x4D, 0xD9},
{0x48, 0xD8, 0x6D, 0xD9, 0x68, 0xD8, 0xB1, 0x84, 0x0D, 0xDA, 0x0E, 0xD8, 0xA3, 0x29, 0x83, 0xDA},
{0x2C, 0x0E, 0xD8, 0xA3, 0x84, 0x49, 0x83, 0xDA, 0x2C, 0x4C, 0x0E, 0xD8, 0xB8, 0xB0, 0xA8, 0x8A},
{0x9A, 0xF5, 0x20, 0xAA, 0xDA, 0xDF, 0xD8, 0xA8, 0x40, 0xAA, 0xD0, 0xDA, 0xDE, 0xD8, 0xA8, 0x60},
{0xAA, 0xDA, 0xD0, 0xDF, 0xD8, 0xF1, 0x97, 0x86, 0xA8, 0x31, 0x9B, 0x06, 0x99, 0x07, 0xAB, 0x97},
{0x28, 0x88, 0x9B, 0xF0, 0x0C, 0x20, 0x14, 0x40, 0xB8, 0xB0, 0xB4, 0xA8, 0x8C, 0x9C, 0xF0, 0x04},
{0x28, 0x51, 0x79, 0x1D, 0x30, 0x14, 0x38, 0xB2, 0x82, 0xAB, 0xD0, 0x98, 0x2C, 0x50, 0x50, 0x78},
{0x78, 0x9B, 0xF1, 0x1A, 0xB0, 0xF0, 0x8A, 0x9C, 0xA8, 0x29, 0x51, 0x79, 0x8B, 0x29, 0x51, 0x79},
{0x8A, 0x24, 0x70, 0x59, 0x8B, 0x20, 0x58, 0x71, 0x8A, 0x44, 0x69, 0x38, 0x8B, 0x39, 0x40, 0x68},
{0x8A, 0x64, 0x48, 0x31, 0x8B, 0x30, 0x49, 0x60, 0xA5, 0x88, 0x20, 0x09, 0x71, 0x58, 0x44, 0x68}
},
{
{0x11, 0x39, 0x64, 0x49, 0x30, 0x19, 0xF1, 0xAC, 0x00, 0x2C, 0x54, 0x7C, 0xF0, 0x8C, 0xA8, 0x04},
{0x28, 0x50, 0x78, 0xF1, 0x88, 0x97, 0x26, 0xA8, 0x59, 0x98, 0xAC, 0x8C, 0x02, 0x26, 0x46, 0x66},
{0xF0, 0x89, 0x9C, 0xA8, 0x29, 0x51, 0x79, 0x24, 0x70, 0x59, 0x44, 0x69, 0x38, 0x64, 0x48, 0x31},
{0xA9, 0x88, 0x09, 0x20, 0x59, 0x70, 0xAB, 0x11, 0x38, 0x40, 0x69, 0xA8, 0x19, 0x31, 0x48, 0x60},
{0x8C, 0xA8, 0x3C, 0x41, 0x5C, 0x20, 0x7C, 0x00, 0xF1, 0x87, 0x98, 0x19, 0x86, 0xA8, 0x6E, 0x76},
{0x7E, 0xA9, 0x99, 0x88, 0x2D, 0x55, 0x7D, 0x9E, 0xB9, 0xA3, 0x8A, 0x22, 0x8A, 0x6E, 0x8A, 0x56},
{0x8A, 0x5E, 0x9F, 0xB1, 0x83, 0x06, 0x26, 0x46, 0x66, 0x0E, 0x2E, 0x4E, 0x6E, 0x9D, 0xB8, 0xAD},
{0x00, 0x2C, 0x54, 0x7C, 0xF2, 0xB1, 0x8C, 0xB4, 0x99, 0xB9, 0xA3, 0x2D, 0x55, 0x7D, 0x81, 0x91},
{0xAC, 0x38, 0xAD, 0x3A, 0xB5, 0x83, 0x91, 0xAC, 0x2D, 0xD9, 0x28, 0xD8, 0x4D, 0xD9, 0x48, 0xD8},
{0x6D, 0xD9, 0x68, 0xD8, 0x8C, 0x9D, 0xAE, 0x29, 0xD9, 0x04, 0xAE, 0xD8, 0x51, 0xD9, 0x04, 0xAE},
{0xD8, 0x79, 0xD9, 0x04, 0xD8, 0x81, 0xF3, 0x9D, 0xAD, 0x00, 0x8D, 0xAE, 0x19, 0x81, 0xAD, 0xD9},
{0x01, 0xD8, 0xF2, 0xAE, 0xDA, 0x26, 0xD8, 0x8E, 0x91, 0x29, 0x83, 0xA7, 0xD9, 0xAD, 0xAD, 0xAD},
{0xAD, 0xF3, 0x2A, 0xD8, 0xD8, 0xF1, 0xB0, 0xAC, 0x89, 0x91, 0x3E, 0x5E, 0x76, 0xF3, 0xAC, 0x2E},
{0x2E, 0xF1, 0xB1, 0x8C, 0x5A, 0x9C, 0xAC, 0x2C, 0x28, 0x28, 0x28, 0x9C, 0xAC, 0x30, 0x18, 0xA8},
{0x98, 0x81, 0x28, 0x34, 0x3C, 0x97, 0x24, 0xA7, 0x28, 0x34, 0x3C, 0x9C, 0x24, 0xF2, 0xB0, 0x89},
{0xAC, 0x91, 0x2C, 0x4C, 0x6C, 0x8A, 0x9B, 0x2D, 0xD9, 0xD8, 0xD8, 0x51, 0xD9, 0xD8, 0xD8, 0x79}
},
{
{0xD9, 0xD8, 0xD8, 0xF1, 0x9E, 0x88, 0xA3, 0x31, 0xDA, 0xD8, 0xD8, 0x91, 0x2D, 0xD9, 0x28, 0xD8},
{0x4D, 0xD9, 0x48, 0xD8, 0x6D, 0xD9, 0x68, 0xD8, 0xB1, 0x83, 0x93, 0x35, 0x3D, 0x80, 0x25, 0xDA},
{0xD8, 0xD8, 0x85, 0x69, 0xDA, 0xD8, 0xD8, 0xB4, 0x93, 0x81, 0xA3, 0x28, 0x34, 0x3C, 0xF3, 0xAB},
{0x8B, 0xF8, 0xA3, 0x91, 0xB6, 0x09, 0xB4, 0xD9, 0xAB, 0xDE, 0xFA, 0xB0, 0x87, 0x9C, 0xB9, 0xA3},
{0xDD, 0xF1, 0xA3, 0xA3, 0xA3, 0xA3, 0x95, 0xF1, 0xA3, 0xA3, 0xA3, 0x9D, 0xF1, 0xA3, 0xA3, 0xA3},
{0xA3, 0xF2, 0xA3, 0xB4, 0x90, 0x80, 0xF2, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3},
{0xA3, 0xB2, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xB0, 0x87, 0xB5, 0x99, 0xF1, 0xA3, 0xA3, 0xA3},
{0x98, 0xF1, 0xA3, 0xA3, 0xA3, 0xA3, 0x97, 0xA3, 0xA3, 0xA3, 0xA3, 0xF3, 0x9B, 0xA3, 0xA3, 0xDC},
{0xB9, 0xA7, 0xF1, 0x26, 0x26, 0x26, 0xD8, 0xD8, 0xFF}
}
};
//DMP update transmissions (Bank, Start Address, Update Length, Update Data...)
// 13% of global variables
static byte dmp_updates[29][9] =
{
{0x03, 0x7B, 0x03, 0x4C, 0xCD, 0x6C} //FCFG_1 inv_set_gyro_calibration
,{0x03, 0xAB, 0x03, 0x36, 0x56, 0x76} //FCFG_3 inv_set_gyro_calibration
,{0x00, 0x68, 0x04, 0x02, 0xCB, 0x47, 0xA2} //D_0_104 inv_set_gyro_calibration
,{0x02, 0x18, 0x04, 0x00, 0x05, 0x8B, 0xC1} //D_0_24 inv_set_gyro_calibration
,{0x01, 0x0C, 0x04, 0x00, 0x00, 0x00, 0x00} //D_1_152 inv_set_accel_calibration
,{0x03, 0x7F, 0x06, 0x0C, 0xC9, 0x2C, 0x97, 0x97, 0x97} //FCFG_2 inv_set_accel_calibration
,{0x03, 0x89, 0x03, 0x26, 0x46, 0x66} //FCFG_7 inv_set_accel_calibration
,{0x00, 0x6C, 0x02, 0x20, 0x00} //D_0_108 inv_set_accel_calibration
,{0x02, 0x40, 0x04, 0x00, 0x00, 0x00, 0x00} //CPASS_MTX_00 inv_set_compass_calibration
,{0x02, 0x44, 0x04, 0x00, 0x00, 0x00, 0x00} //CPASS_MTX_01
,{0x02, 0x48, 0x04, 0x00, 0x00, 0x00, 0x00} //CPASS_MTX_02
,{0x02, 0x4C, 0x04, 0x00, 0x00, 0x00, 0x00} //CPASS_MTX_10
,{0x02, 0x50, 0x04, 0x00, 0x00, 0x00, 0x00} //CPASS_MTX_11
,{0x02, 0x54, 0x04, 0x00, 0x00, 0x00, 0x00} //CPASS_MTX_12
,{0x02, 0x58, 0x04, 0x00, 0x00, 0x00, 0x00} //CPASS_MTX_20
,{0x02, 0x5C, 0x04, 0x00, 0x00, 0x00, 0x00} //CPASS_MTX_21
,{0x02, 0xBC, 0x04, 0x00, 0x00, 0x00, 0x00} //CPASS_MTX_22
,{0x01, 0xEC, 0x04, 0x00, 0x00, 0x40, 0x00} //D_1_236 inv_apply_endian_accel
,{0x03, 0x7F, 0x06, 0x0C, 0xC9, 0x2C, 0x97, 0x97, 0x97} //FCFG_2 inv_set_mpu_sensors
,{0x04, 0x02, 0x03, 0x0D, 0x35, 0x5D} //CFG_MOTION_BIAS inv_turn_on_bias_from_no_motion
,{0x04, 0x09, 0x04, 0x87, 0x2D, 0x35, 0x3D} //FCFG_5 inv_set_bias_update
,{0x00, 0xA3, 0x01, 0x00} //D_0_163 inv_set_dead_zone
,//SET INT_ENABLE at i=22
{0x07, 0x86, 0x01, 0xFE} //CFG_6 inv_set_fifo_interupt
,{0x07, 0x41, 0x05, 0xF1, 0x20, 0x28, 0x30, 0x38} //CFG_8 inv_send_quaternion
,{0x07, 0x7E, 0x01, 0x30} //CFG_16 inv_set_footer
,{0x07, 0x46, 0x01, 0x9A} //CFG_GYRO_SOURCE inv_send_gyro
,{0x07, 0x47, 0x04, 0xF1, 0x28, 0x30, 0x38} //CFG_9 inv_send_gyro -> inv_construct3_fifo
,{0x07, 0x6C, 0x04, 0xF1, 0x28, 0x30, 0x38} //CFG_12 inv_send_accel -> inv_construct3_fifo
,{0x02, 0x16, 0x02, 0x00, 0x0A} //D_0_22 inv_set_fifo_rate
};
SoftwareSerial hc06(2,3); // RXPIN TXPIN
Adafruit_MLX90614 mlx = Adafruit_MLX90614();
MAX30105 particleSensor;
const byte RATE_SIZE = 4; //Increase this for more averaging. 4 is good.
byte rates[RATE_SIZE]; //Array of heart rates
byte rateSpot = 0;
long lastBeat = 0; //Time at which the last beat occurred
float beatsPerMinute;
int beatAvg;
RTCDS1307 rtc(0x68);
uint8_t year, month, weekday, day, hour, minute, second;
bool period = 0;
//String m[12] = {"January", "February", "Março", "Abril", "Maio", "Junho", "Julho", "Agosto", "Setembro", "Outubro", "Novembro", "Dezembro"};
//String w[7] = {"Domingo", "Segunda", "Terça", "Quarta", "Quinta", "Sexta", "Sábado"};
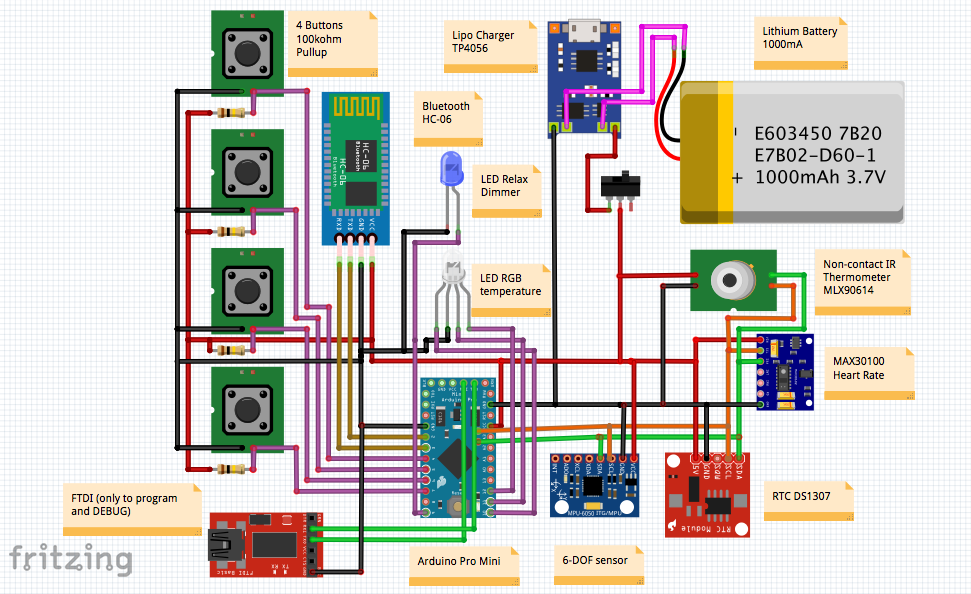
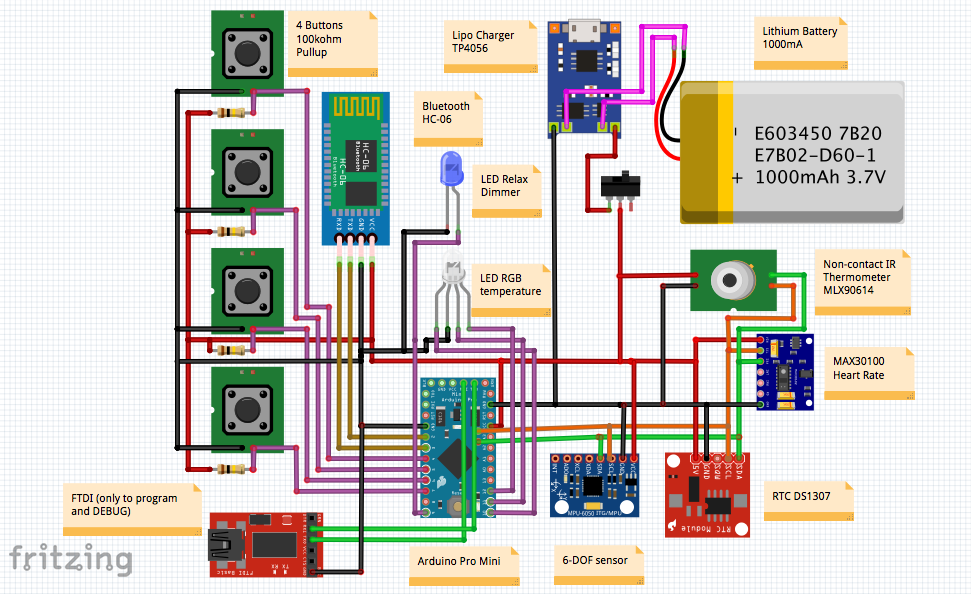
/*
* PIN Description :
* D0 Serial USB RX
* D1 Serial USB TX
* D2 Serial Bluetooth RX
* D3 Serial Bluetooth TX
* D4 Button 1
* D5 Button 2
* D6 Button 3
* D7 Button 4
* D8 --------------->UNUSED
* D9 DIMMER BLUE LED
* D10 LED RGB RED
* D11 LED RGB Green
* D12 LED RGB BLUE
* D13 LED DEBUG
* A0 --------------->UNUSED
* A1 --------------->UNUSED
* A2 --------------->UNUSED
* A3 --------------->UNUSED
* A4 SDA I2C >> 6-DOF / RTC / Temperature / Pulse
* A5 SCL I2C >> 6-DOF / RTC / Temperature / Pulse
*/
int Button_1_Pin = 4;
int Button_2_Pin = 5;
int Button_3_Pin = 6;
int Button_4_Pin = 7;
int ledDim_Pin = 9; // LED dimmer connected to digital pin 9
int ledRGB_Red_Pin = 10;
int ledRGB_Green_Pin = 11;
int ledRGB_Blue_Pin = 12;
int ledDebug_Pin = 13; // LED Debug connected to digital 13
byte Button_1_press = 0;
byte Button_2_press = 0;
byte Button_3_press = 0;
byte Button_4_press = 0;
int Button_1_press_cpt = 0;
int Button_2_press_cpt = 0;
int Button_3_press_cpt = 0;
int Button_4_press_cpt = 0;
int device_MODE = 0;
bool flag_init_MPU6050=0;
unsigned int cpt=0; // General system counter
// LED Dimmer management
unsigned int fadeValue=0;
bool fadeDirection=0;
int EEPROM_current_addr = 0;
void setup() {
Serial.begin(9600);
Wire.begin();
delay(1);
pin_init(); // Initialize input/output PIN
mlx.begin();
//MAX30105_init();
hc06_init();
DS1307_init();
Serial.println("START LOOP");
}
void loop() {
if (Buttons_FREQUENCY_READ_PER_CYCLE == 0){Button_read();}
// Heart rate sensor module
//if (MAX30105_FREQUENCY_READ_PER_CYCLE == 0){MAX30105_read();}
// Temperature module
if (MLX90614_FREQUENCY_READ_PER_CYCLE == 0 && device_MODE==3){MLX90614_read();}
// 6-DOF sensor module
if (MPU6050_FREQUENCY_READ_PER_CYCLE == 0 && device_MODE==4){
if(!flag_init_MPU6050){
MPU6050_init();
delay(10);
flag_init_MPU6050=1;
}
MPU6050_read();}
// Real time clock module
if (DS1307_FREQUENCY_READ_PER_CYCLE == 0 && device_MODE==1){DS1307_read();}
// Bluetooth Module
if (HC06_FREQUENCY_READ_PER_CYCLE == 0 && device_MODE==1){if (hc06.available()){Serial.write(hc06.read());}}
if (Serial_FREQUENCY_READ_PER_CYCLE == 0 && device_MODE==1){if (Serial.available()){Serial.write(Serial.read());}}
if (DimLED_FREQUENCY_READ_PER_CYCLE == 0 && device_MODE==2){DimLED_write();}
if (DebugLED_FREQUENCY_READ_PER_CYCLE == 0 && device_MODE==0){DebugLED_write();}
if (DebugLED_FREQUENCY_READ_PER_CYCLE == 0){
if(device_MODE != 4 && flag_init_MPU6050 == 1){
flag_init_MPU6050=0;
}
if(device_MODE != 4 && flag_init_MPU6050 == 1){
DebugINFO_write();
}
}
if(cpt == MAX_COUNTER){cpt=0;}
else{cpt++;}
//delay(1);
}
// --------------------General functions--------------------
void pin_init() {
pinMode(ledDim_Pin, OUTPUT);
pinMode(ledDebug_Pin, OUTPUT);
pinMode(ledRGB_Red_Pin, OUTPUT);
pinMode(ledRGB_Green_Pin, OUTPUT);
pinMode(ledRGB_Blue_Pin, OUTPUT);
pinMode(Button_1_Pin, INPUT);
pinMode(Button_2_Pin, INPUT);
pinMode(Button_3_Pin, INPUT);
pinMode(Button_4_Pin, INPUT);
}
void DebugINFO_write() {
Serial.print("SYSTEM INFO : ");
Serial.print("MODE=");Serial.print(device_MODE);Serial.print(" --- ");
Serial.print("CPT_1=");Serial.print(Button_1_press);Serial.print(" --- ");
Serial.print("CPT_2=");Serial.print(Button_2_press);Serial.print(" --- ");
Serial.print("CPT_3=");Serial.print(Button_3_press);Serial.print(" --- ");
Serial.print("CPT_4=");Serial.print(Button_4_press);Serial.print(" --- ");
Serial.println();
EEPROM.write(EEPROM_current_addr, Button_1_press);
//EEPROM.length()
}
void DebugLED_write() {
digitalWrite(ledDebug_Pin, !digitalRead(ledDebug_Pin));
}
// --------------------Buttons and mode management--------------------
void Button_read(){
// --------------Button 1--------------
int Button_Statut = 0;
if (Button_1_press_cpt >= Min_Time_Short_Push_Button && Button_1_press_cpt < Min_Time_Long_Push_Button && (digitalRead(Button_1_Pin))==1){Button_Statut=1;}
else if (Button_1_press_cpt >= Min_Time_Long_Push_Button && (digitalRead(Button_1_Pin))==1){Button_Statut=2;}
if(Button_Statut == 1){
Serial.println("Short Press Button 1");
Button_1_press++;
device_MODE=0;
Button_1_press_cpt=0;
}
else if(Button_Statut == 2){
Serial.println("Long Press Button 1");
device_MODE=1;
Button_1_press_cpt=0;
}
//if((digitalRead(Button_1_Pin))==0){Button_1_press_cpt++;Serial.println(Button_1_press_cpt);}
//else{Button_1_press_cpt=0;}
if((digitalRead(Button_1_Pin))==0){Button_1_press_cpt++;}
else{Button_1_press_cpt=0;}
// --------------Button 2--------------
Button_Statut=0;
if (Button_2_press_cpt >= Min_Time_Short_Push_Button && Button_2_press_cpt < Min_Time_Long_Push_Button && (digitalRead(Button_2_Pin))==1){Button_Statut=1;}
else if (Button_2_press_cpt >= Min_Time_Long_Push_Button && (digitalRead(Button_2_Pin))==1){Button_Statut=2;}
if(Button_Statut == 1){
Serial.println("Short Press Button 2");
Button_2_press++;
device_MODE=0;
Button_2_press_cpt=0;
}
else if(Button_Statut == 2){
Serial.println("Long Press Button 2");
device_MODE=2;
Button_2_press_cpt=0;
}
if((digitalRead(Button_2_Pin))==0){Button_2_press_cpt++;}
else{Button_2_press_cpt=0;}
// --------------Button 3--------------
Button_Statut=0;
if (Button_3_press_cpt >= Min_Time_Short_Push_Button && Button_3_press_cpt < Min_Time_Long_Push_Button && (digitalRead(Button_3_Pin))==1){Button_Statut=1;}
else if (Button_3_press_cpt >= Min_Time_Long_Push_Button && (digitalRead(Button_3_Pin))==1){Button_Statut=2;}
if(Button_Statut == 1){
Serial.println("Short Press Button 3");
Button_3_press++;
device_MODE=0;
Button_3_press_cpt=0;
}
else if(Button_Statut == 2){
Serial.println("Long Press Button 3");
device_MODE=3;
Button_3_press_cpt=0;
}
if((digitalRead(Button_3_Pin))==0){Button_3_press_cpt++;}
else{Button_3_press_cpt=0;}
// --------------Button 4--------------
Button_Statut=0;
if (Button_4_press_cpt >= Min_Time_Short_Push_Button && Button_4_press_cpt < Min_Time_Long_Push_Button && (digitalRead(Button_4_Pin))==1){Button_Statut=1;}
else if (Button_4_press_cpt >= Min_Time_Long_Push_Button && (digitalRead(Button_4_Pin))==1){Button_Statut=2;}
if(Button_Statut == 1){
Serial.println("Short Press Button 4");
Button_4_press++;
device_MODE=0;
Button_4_press_cpt=0;
}
else if(Button_Statut == 2){
Serial.println("Long Press Button 4");
device_MODE=4;
Button_4_press_cpt=0;
}
if((digitalRead(Button_4_Pin))==0){Button_4_press_cpt++;}
else{Button_4_press_cpt=0;}
}
// --------------------Dimmer LED--------------------
void DimLED_write() {
//Serial.print(fadeDirection);
//Serial.print(" ");
//Serial.println(fadeValue);
analogWrite(ledDim_Pin, fadeValue);
if(fadeDirection==0){
fadeValue=fadeValue+8;
}
else if(fadeDirection==1){
fadeValue=fadeValue-8;
}
if (fadeValue > 255 && fadeValue <= 0x7FFF){
fadeDirection=1;
fadeValue=255;
}
else if (fadeValue > 0x7FFF){
fadeDirection=0;
fadeValue=0;
}
}
// --------------------DS1307 RTC Clock functions--------------------
void DS1307_init(){
rtc.begin();
rtc.setDate(19, 2, 28);
rtc.setTime(23, 59, 50);
}
void DS1307_read(){
/*rtc.getDate(year, month, day, weekday);
rtc.getTime(hour, minute, second, period);
if (!(second % 3)) rtc.setMode(1 - rtc.getMode());
rtc.getTime(hour, minute, second, period);
Serial.print(w[weekday - 1]);
Serial.print(" ");
Serial.print(day, DEC);
Serial.print("/");
Serial.print(m[month - 1]);
Serial.print("/");
Serial.print(year + 2000, DEC);
Serial.print(" ");
Serial.print(hour, DEC);
Serial.print(":");
Serial.print(minute, DEC);
Serial.print(":");
Serial.print(second, DEC);
Serial.print(rtc.getMode() ? (period ? " PM" : " AM") : "");
Serial.println();*/
//delay(1000);
}
// --------------------MLX90614 Temperature Sensor--------------------
void MLX90614_read(){
//Serial.print("Ambient = ");
/* Serial.print(mlx.readAmbientTempC());
Serial.print("*C\tObject = ");
Serial.print(mlx.readObjectTempC()); Serial.println("*C");
Serial.print("Ambient = ");
Serial.print(mlx.readAmbientTempF());
Serial.print("*F\tObject = ");
Serial.print(mlx.readObjectTempF()); Serial.println("*F");
Serial.println();*/
//delay(500);
}
// --------------------MAX30105 Pulse Sensor--------------------
void MAX30105_init() {
if (!particleSensor.begin(Wire, I2C_SPEED_FAST)) //Use default I2C port, 400kHz speed
{
Serial.println("MAX30105 was not found. Please check wiring/power. ");
while (1);
}
Serial.println("Place your index finger on the sensor with steady pressure.");
particleSensor.setup(); //Configure sensor with default settings
particleSensor.setPulseAmplitudeRed(0x0A); //Turn Red LED to low to indicate sensor is running
particleSensor.setPulseAmplitudeGreen(0); //Turn off Green LED
}
void MAX30105_read(){
digitalWrite(ledRGB_Red_Pin, HIGH);
long irValue = particleSensor.getIR();
if (checkForBeat(irValue) == true)
{
//We sensed a beat!
long delta = millis() - lastBeat;
lastBeat = millis();
beatsPerMinute = 60 / (delta / 1000.0);
if (beatsPerMinute < 255 && beatsPerMinute > 20)
{
rates[rateSpot++] = (byte)beatsPerMinute; //Store this reading in the array
rateSpot %= RATE_SIZE; //Wrap variable
//Take average of readings
beatAvg = 0;
for (byte x = 0 ; x < RATE_SIZE ; x++)
beatAvg += rates[x];
beatAvg /= RATE_SIZE;
}
digitalWrite(ledRGB_Red_Pin, LOW);
}
Serial.print("IR=");
Serial.print(irValue);
Serial.print(", BPM=");
Serial.print(beatsPerMinute);
Serial.print(", Avg BPM=");
Serial.print(beatAvg);
if (irValue < 50000)
Serial.print(" No finger?");
Serial.println();
}
// --------------------HC-06 Bluetooth functions--------------------
void hc06_init() {
hc06.begin(9600);
//hc06.write('A');
//hc06.write('T');
//hc06.write('\n');
}
// --------------------MPU6050 6DOF functions--------------------
void MPU6050_init() {
check_MPU();
regWrite(0x6B, 0xC0);
regWrite(0x6C, 0x00);
delay(10);
// regWrite(0x6B, 0x70);
regWrite(0x6B, 0x00);
regWrite(0x6D, 0x70);
regWrite(0x6E, 0x06);
temp = regRead(0x6F);
//Serial.print("Bank 1, Reg 6 = ");
//Serial.println(temp, HEX);
// temp = regRead(0x6B);
// Serial.println(temp, HEX);
regWrite(0x6D, 0x00);
temp = regRead(0x00);
//Serial.println(temp, HEX);
temp = regRead(0x01);
//Serial.println(temp, HEX);
temp = regRead(0x02);
//Serial.println(temp, HEX);
temp = regRead(0x6A);
//Serial.println(temp, HEX);
regWrite(0x37, 0x32);
temp = regRead(0x6B);
//Serial.println(temp, HEX);
delay(5);
// regWrite(0x25, 0x68); //Set Slave 0 to self
//
// regWrite(0x6A, 0x02);
mem_init();
delay(20);
}
void MPU6050_read() {
if (millis() >= lastRead + 10) {
lastRead = millis();
if (fifoReady()) {
getPacket();
temp = regRead(0x3A);
if (firstPacket) {
delay(1);
bank_sel(0x00);
regWrite(0x6E, 0x60);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6F);
Wire.write(0x04); Wire.write(0x00); Wire.write(0x00); Wire.write(0x00);
// Wire.write(0x00); Wire.write(0x80); Wire.write(0x00); Wire.write(0x00);
Wire.endTransmission();
bank_sel(1);
regWrite(0x6E, 0x62);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6F);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR, 2);
temp = Wire.read();
temp = Wire.read();
firstPacket = false;
fifoReady();
}
// resetFifo();
if (fifoCountL == 42) {
processQuat();
sendQuat();
}
}
}
}
void dmp_init() {
for (int i = 0; i < 7; i++) {
bank_sel(i);
for (byte j = 0; j < 16; j++) {
byte start_addy = j * 0x10;
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_START_ADDR);
Wire.write(start_addy);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_R_W);
for (int k = 0; k < 16; k++) {
unsigned char byteToSend = pgm_read_byte(&(dmpMem[i][j][k]));
Wire.write((byte) byteToSend);
}
Wire.endTransmission();
}
}
bank_sel(7);
for (byte j = 0; j < 8; j++) {
byte start_addy = j * 0x10;
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_START_ADDR);
Wire.write(start_addy);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_R_W);
for (int k = 0; k < 16; k++) {
unsigned char byteToSend = pgm_read_byte(&(dmpMem[7][j][k]));
Wire.write((byte) byteToSend);
}
Wire.endTransmission();
}
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_START_ADDR);
Wire.write(0x80);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_R_W);
for (int k = 0; k < 9; k++) {
unsigned char byteToSend = pgm_read_byte(&(dmpMem[7][8][k]));
Wire.write((byte) byteToSend);
}
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_R_W);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR, 9);
// Wire.endTransmission();
byte incoming[9];
for (int i = 0; i < 9; i++) {
incoming[i] = Wire.read();
}
}
void mem_init() {
dmp_init();
for (byte i = 0; i < 22; i++) {
bank_sel(dmp_updates[i][0]);
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_START_ADDR);
Wire.write(dmp_updates[i][1]);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_R_W);
for (byte j = 0; j < dmp_updates[i][2]; j++) {
Wire.write(dmp_updates[i][j + 3]);
}
Wire.endTransmission();
}
regWrite(0x38, 0x32);
for (byte i = 22; i < 29; i++) {
bank_sel(dmp_updates[i][0]);
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_START_ADDR);
Wire.write(dmp_updates[i][1]);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_R_W);
for (byte j = 0; j < dmp_updates[i][2]; j++) {
Wire.write(dmp_updates[i][j + 3]);
}
Wire.endTransmission();
}
temp = regRead(0x6B);
//Serial.println(temp, HEX);
temp = regRead(0x6C);
//Serial.println(temp, HEX);
regWrite(0x38, 0x02);
regWrite(0x6B, 0x03);
regWrite(0x19, 0x04);
regWrite(0x1B, 0x18);
regWrite(0x1A, 0x0B);
regWrite(0x70, 0x03);
regWrite(0x71, 0x00);
regWrite(0x00, 0x00);
regWrite(0x01, 0x00);
regWrite(0x02, 0x00);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x13);
for (byte i = 0; i < 6; i++) {
Wire.write(0x00);
}
Wire.endTransmission();
// regWrite(0x24, 0x00);
bank_sel(0x01);
regWrite(0x6E, 0xB2);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6F);
Wire.write(0xFF); Wire.write(0xFF);
Wire.endTransmission();
bank_sel(0x01);
regWrite(0x6E, 0x90);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6F);
Wire.write(0x09); Wire.write(0x23); Wire.write(0xA1); Wire.write(0x35);
Wire.endTransmission();
temp = regRead(0x6A);
regWrite(0x6A, 0x04);
//Insert FIFO count read?
fifoReady();
regWrite(0x6A, 0x00);
regWrite(0x6B, 0x03);
delay(2);
temp = regRead(0x6C);
// Serial.println(temp, HEX);
regWrite(0x6C, 0x00);
temp = regRead(0x1C);
// Serial.println(temp, HEX);
regWrite(0x1C, 0x00);
delay(2);
temp = regRead(0x6B);
// Serial.println(temp, HEX);
regWrite(0x1F, 0x02);
regWrite(0x21, 0x9C);
regWrite(0x20, 0x50);
regWrite(0x22, 0x00);
regWrite(0x6A, 0x04);
regWrite(0x6A, 0x00);
regWrite(0x6A, 0xC8);
bank_sel(0x01);
regWrite(0x6E, 0x6A);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6F);
Wire.write(0x06); Wire.write(0x00);
Wire.endTransmission();
bank_sel(0x01);
regWrite(0x6E, 0x60);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6F);
for (byte i = 0; i < 8; i++) {
Wire.write(0x00);
}
Wire.endTransmission();
bank_sel(0x00);
regWrite(0x6E, 0x60);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6F);
Wire.write(0x40); Wire.write(0x00); Wire.write(0x00); Wire.write(0x00);
Wire.endTransmission();
//resetFifo();
}
void regWrite(byte addy, byte regUpdate) {
Wire.beginTransmission(MPU_ADDR);
Wire.write(addy);
Wire.write(regUpdate);
Wire.endTransmission();
}
byte regRead(byte addy) {
Wire.beginTransmission(MPU_ADDR);
Wire.write(addy);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR, 1);
// Wire.endTransmission();
while (!Wire.available()) {
}
byte incoming = Wire.read();
return incoming;
}
void getPacket() {
if (fifoCountL > 32) {
fifoCountL2 = fifoCountL - 32;
longPacket = true;
}
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x74);
Wire.endTransmission();
// Wire.requestFrom(MPU_ADDR, 42);
// for(byte i = 0; i < fifoCountL; i++){
if (longPacket) {
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR, 32);
for (byte i = 0; i < 32; i++) {
received_packet[i] = Wire.read();
}
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x74);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR, (unsigned int)fifoCountL2);
for (byte i = 32; i < fifoCountL; i++) {
received_packet[i] = Wire.read();
}
longPacket = false;
}
else {
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR, (unsigned int)fifoCountL);
for (byte i = 0; i < fifoCountL; i++) {
received_packet[i] = Wire.read();
}
}
}
byte read_interrupt() {
byte int_status = regRead(0x3A);
return int_status;
}
boolean fifoReady() {
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x72);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR, 2);
// Wire.endTransmission();
byte fifoCountH = Wire.read();
fifoCountL = Wire.read();
//Serial.println(fifoCountL, DEC);
if (fifoCountL == 42 || fifoCountL == 44) {
return 1;
}
else if(fifoCountL != 0){
resetFifo();
}
else return 0;
}
void resetFifo() {
byte ctrl = regRead(0x6A);
ctrl |= 0b00000100;
regWrite(0x6A, ctrl);
}
void check_MPU() {
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x75);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR, 1);
byte aByte = Wire.read();
if (aByte == 0x68) {
Serial.println("Found MPU6050");
}
else {
Serial.println("Didn't find MPU6050");
}
}
void processQuat() {
processed_packet[0] = received_packet[0];
processed_packet[1] = received_packet[1];
processed_packet[2] = received_packet[4];
processed_packet[3] = received_packet[5];
processed_packet[4] = received_packet[8];
processed_packet[5] = received_packet[9];
processed_packet[6] = received_packet[12];
processed_packet[7] = received_packet[13];
}
void sendQuat() {
q[0] = (long) ((((unsigned long) processed_packet[0]) << 8) + ((unsigned long) processed_packet[1]));
...
This file has been truncated, please download it to see its full contents.




















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)

{kind=link}
Comments
Please log in or sign up to comment.