


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 3 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
| ||||||
 |
| |||||
| ||||||
 |
| |||||
Introduction: Cute Drawing Buddy V1, SCARA Robot - Arduino
I want to make a robo arm with less cost which draw cute pictures. That robot want to make my Daughter happy and it can able to dance. I saw a Cutest drawing robot in Kickstarter. I like it very much and want to make one such robot. So i go through my school life studies and check out trigonometry and Algebra to find out how it works and after several days i find the solution and check the result in calculation. Then i surprised i find the solution. So i want to build it with some cost (because all my previous projects are maxinum 90% from trash). Lets see how I develop it step by step. I am sure even i do it with out any special tools u with tools do it very easily
The software EXE is not able to attach So if any one want that exe just send me your mail id to jegatheesan_s@yahoo.co.in.
Step 1: Materials Required
Materials Required
1) Arduino UNO - 1No
2) Tower Pro micro Servo motor - 3Nos.
3) 1000 micro F capacitor - 1 No (to stop servo from shaking).
4) Plain PCB.
5) Male Connector.
6) Aluminium Partition Waste.
7) Screws and nuts.
Tools Required
1) Hot glow gun.
2) Hack saw blade and frame.
3) Drilling machine.
4) Medium File.
5) Screw driver.
6) Nose player.
7) Soldering iron.
Step 2: Building Shield
1) First step is to build a arduino shield to drive 3 Servos. In motero shiled 1 we only drive 2 servos. So i make my own shield.
2) I use the pins 3,5 and 6 in the arduino to drive the servos.
3) From arduino to Servo i use a thin long flexible wire (I Use my old mouse wise it has 5 wires very thin and string). Two wires for +5V and 3 wires for servo driven.
4) A separate board in the side of the device to control servos. I that board i use 3 X 3 Male connector to connect servos.
5) A capacitor 1000 micro f between Power supply for servos is soldered. and to avoid short circuit and wires break from soldering, i cover all soldered wire with hot glue gun.
Step 3: Check the Concept
1) After make a startup software and check the angles generated. I want to test that this servo is correct for my application.
2) So i just use straws at first to find its working correct.
3) Straws dimension are 50mm 2nos, 32mm 1no and 82mm 1Nos.
4) Its working fine and the test pass. But some more calculation is missing. So some calculation want to change.
Step 4: Make Servo Holders
1) Its time to assemble my drawing buddy. But this is the very hard work.
2) I use ALuminium from partion work waste from my friend to make 4 'L' bends of dimension 30 X 40 X 27.
3) Mark the portion for Servo and give it to a milling machine. They only able to take the shape as oval.
4) I use a triangle file to make it rectangle.
5) Take it for 3 pieces and another one piece for holding the up down servo.
6) Connect the two pieces using screws.
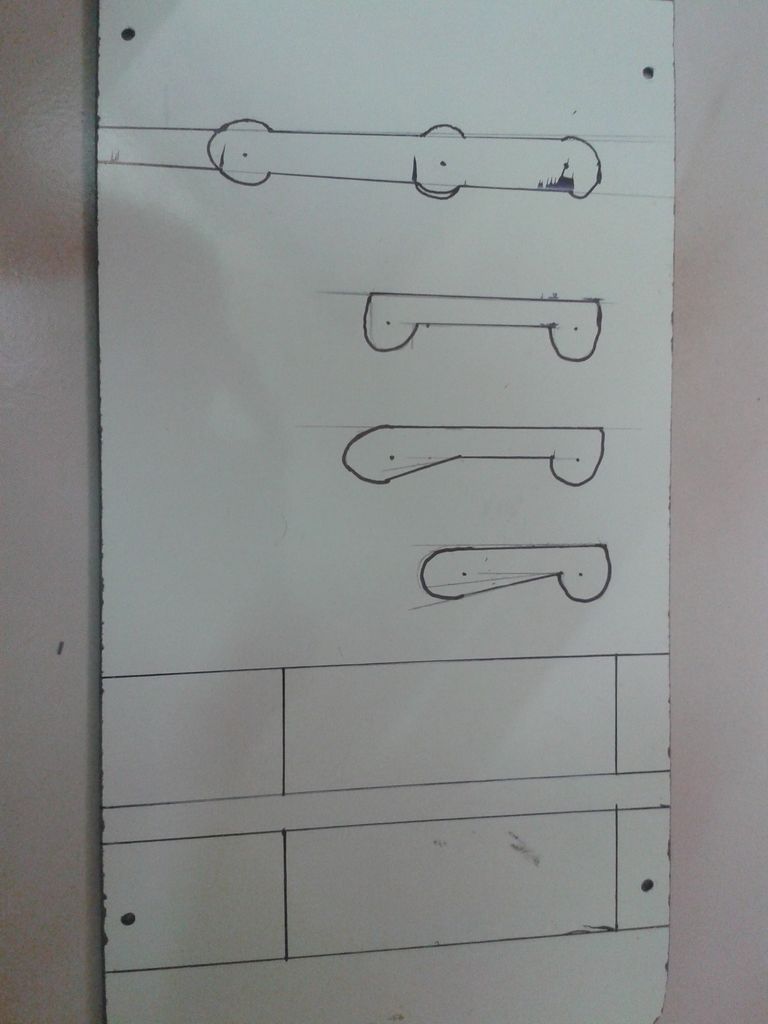
Step 5: Making Arms
1) Its the hand for my Drawing buddy.
2) I take the dimension 32mm one number, 50mm two numbers and 82mm one number.
3) Make it in the novopan sheet and give it to the switch slot taken work shop.
4) They make it as an art.
5) With 6mm hole for link they give it back to me in pieces.
6) I link the arm parts and check the rectangle dimension with my plan. Its excatly matched.
Step 6: Connecting Arm to Servo
1) Arms are now ideal when connect it with the servo only it get life.
2) stick servo arm connector straight to the novopan arm with hot glue gun.
3) connect this to the servo using screw. through the novopan arm hole.
Step 7: Testing With Out Pen Up Down
1) Now the 2 servos are fitted to the aluminium frame slot and stick with hot glue gun.
2) Join the arms with screws and before fitted fully, want to check and tune the software.
3) So paste the frame to a flat surface facing each other correctly center.
4) In the arm edge paste a sketch to draw.
5) Place a plain paper below the sketch.
6) Test it with the software and after some changes in software and angle in the servo arm connection finally the result is fine.
Step 8: Testing Video
This is the testing video for circle and waves.
Step 9: Make Stand
1) Stand must be small then only its compact and also more space for drawing near the Buddy. It must be weight hig than the other assembly then only it stand still when arm move.
2) I got a waste play wood.
3) I cut it in the size of 30mm x 100mm and mark the center at 50mm.
4) Make a 6 mm hole in the two sides as shown in the figure (use bench drilling then only the holes are straight).
5) Make a small piece in navapan sheet and drill the same size hole in that one. (to keep the rails parallel)
6) Now Now scre the 6mm rod both sides tightly to make it stand straight.
Step 10: Fix Up Down Arrangement
1) Now the stand is ready. We want an arrangement to hold the servos and move up and down in the rail.
2) I use a old pen. Cut the pen in to two pieces and insert into the rods, The pen inner dia is more greater than the rod dia. So i insert a straw firat in to the rod and straw is tight with the rod and when pen is put over that it moves fine with out shake.
3) Now cut two pieces of novopan sheet i take the dimension (30mm X 90mm) and take slot in the bottom for the space to nuts in the stand.
4) Then stick the two sheets in the both sides of the pen in the stand. Glue it fully then only it hold the weight.
5) Now check the movement of up/down action.
6) Fix the Writing servo arrangement on one side of the slide with hot glue gun or screws.
7) Now check it by fixing the arms.
Step 11: Up Down Mechanism
1) Up down mechanism is quite easy using a old toy car wheel.
2) Just Hot glue the old toy car wheel to the servo arm away from the center. This acts to lift the arrangement smoothly.
3) Fix the arrangement to the other side of the slide.
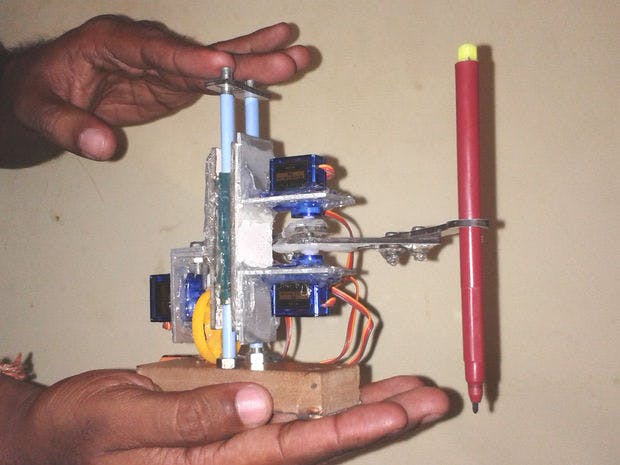
Step 12: Assembled Draw Buddy
1) Its well come after 3 days night work.
2) Hot glue the connector to the non servo moving side and connect the servos.
3) See the all side views of my Draw Buddy its very cute.
Step 13: Servos Control Program
1) Connect the Servo connector to the arduino.
2) Its time to write the code for Computer and Arduino. I reduce the work of arduino by increase the work of the Computer.
3) Here with this i attached the Arduino code. Arduino turns the servos degrees as per pc command.
Step 14: Desktop Application
1) Download the zip file and unzip it.
2) Change the Arduino connected comport name in the config,inf file.
3) Download and install .net frame work 4 or more.
4) Run the Application. After connected the arduino to the port. This program run only in windows.
Step 15: My Own Buddy Control Software
1) The application is not a downloaded application. It is developed by me. Actually i like very much to program logically.
2) In the control software we can draw the picture as line art and ask the buddy to draw it.
3) U have a save button to save the drawn picture and also a open button to open the saved one.
4) On click the Open Port the system connected to the Arduino.
5) By click the Draw buddy, Draw buddy draw the image as like we draw.
6) While drawing use the slider button to erase the drawn line.
(More ideas are in progress to convert vector drawing to our format)
Step 16: Checking All
1) Its time to check.
2) Connect the connectors and power supplies.
3) Draw lines in the application and click open port and then click draw buddy.
4) Buddy draw it as like the picture .
Problems Faced at first
1) Drawing is drawn in mirror format.
2) When pen up and down it leaves some lines at the end of up due to delay has same time.
This can be corrected by altered the arduino coding and Computer coding.
Step 17: Final Changes and Packing
1) Its very compatable so u can able to hold in one hand.
2) Fix the Arduino into a plastic box.
3) Arduino to Draw buddy has long wire, so that we can able to move it to the long place and draw where ever we want.
Note At first while drawing My buddy moves some time. Finally i notice the surface of my Buddy is polished. So i rub with emery and make it rough. Now it works fine with out holding.
Step 18: Draw Buddy in Action
After lot of trial and error here the finished one with out error.
Step 19: Action in Papers
Lot and lot of pictures are drawn by my buddy to make my daughter happy.
Step 20: Action in Tiles
It not only draw in paper it paint in any flat surface. Here a a sample from my Room Tiles.
Its very interesting to done this project after some gap. Its very cool and like by all age groups in my family. I also recall lot of mathematics from my school life. Its a nice experience to work in this project. Want to do lot of upgrades in this project that's only i make it as V1.
Thank You Very much for Watching this tutorials.
Very eager to hear comments from You all.
Be cool make a Lot.


{kind=link}
Comments
Please log in or sign up to comment.