/*
* Project: Key fob for SafeChild Care Seat Monitor
* Author: Jon Phillips
* Last Updated: 30 November 2023
*/
#include "Particle.h"
#include <NeoPixel.h>
#include <Adafruit_MQTT.h>
#include <Adafruit_MQTT/Adafruit_MQTT_SPARK.h>
#include <Adafruit_MQTT/Adafruit_MQTT.h>
#include <credentials.h>
#include <math.h>
SYSTEM_MODE(SEMI_AUTOMATIC);
SYSTEM_THREAD(ENABLED);
void bleConnect();
void onDataReceived(const uint8_t *data, size_t len, const BlePeerDevice &peer, void *context);
void MQTT_connect();
bool MQTT_ping();
void publish();
void alert();
const int PIXELCOUNT = 1;
bool alertOn;
Adafruit_NeoPixel pixel ( PIXELCOUNT, SPI1 , WS2812B );
const BleUuid serviceUuid("6E400001-B5A3-F393-E0A9-E50E24DCCA9E");
const BleUuid rxUuid("6E400002-B5A3-F393-E0A9-E50E24DCCA9E");
const BleUuid txUuid("6E400003-B5A3-F393-E0A9-E50E24DCCA9E");
const size_t SCAN_RESULT_MAX = 20;
BleScanResult scanResults[SCAN_RESULT_MAX];
BleCharacteristic peerRxCharacteristic;
BleCharacteristic peerTxCharacteristic;
BlePeerDevice peer;
BleCharacteristic rxCharacteristic ("rx",BleCharacteristicProperty::WRITE_WO_RSP,rxUuid,serviceUuid,onDataReceived,NULL);
uint8_t i;
TCPClient TheClient;
Adafruit_MQTT_SPARK mqtt(&TheClient,AIO_SERVER,AIO_SERVERPORT,AIO_USERNAME,AIO_KEY);
Adafruit_MQTT_Publish pubFeedLt = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/SafeChildLight");
Adafruit_MQTT_Publish pubFeedTxt = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/SafeChildText");
Adafruit_MQTT_Publish pubFeedFR = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/SafeChildFobRange");
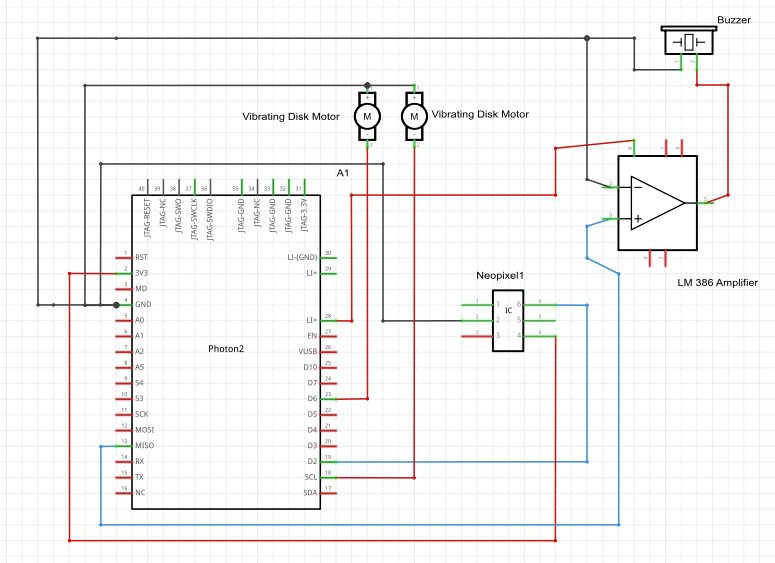
const int BUZZER = D16;
const int VIBRATE1 = D1;
const int VIBRATE2 = D6;
int count;
int RSSI;
int BuckleCheck;
bool lastBuckleCheck;
int timer;
int lastTime;
Thread thread("ALERT",alert);
void setup() {
Serial.begin(9600);
waitFor(Serial.isConnected, 15000);
BLE.on();
peerTxCharacteristic.onDataReceived(onDataReceived, &peerTxCharacteristic);
pixel.begin();
pixel.show();
pixel.setBrightness(100);
pinMode (BUZZER,OUTPUT);
WiFi.on();
WiFi.connect();
while(WiFi.connecting()) {
Serial.printf(".");
}
}
void loop() {
MQTT_connect();
MQTT_ping();
bleConnect();
while(peer.connected()){
pixel.setBrightness(40);
pixel.setPixelColor(0,0x0000ff);
pixel.show();
peer.getCharacteristicByUUID(peerRxCharacteristic, rxUuid);
peer.getCharacteristicByUUID(peerTxCharacteristic, txUuid);
publish();
alertOn=false;
}
while(!peer.connected()){
if(lastBuckleCheck){
// pixel.setBrightness(100);
// pixel.setPixelColor(0,0xff0000);
// pixel.show();
alertOn=true;
// pixel.clear();
// pixel.show();
publish();
}
if(!lastBuckleCheck){
pixel.setBrightness(40);
pixel.setPixelColor(0,0x00ff00);
pixel.show();
publish();
}
bleConnect();
}
}
void onDataReceived(const uint8_t *data, size_t len, const BlePeerDevice &peer, void *context){
if(peer.address()[0]==0x05){
BuckleCheck = atoi((char*)data);
if(BuckleCheck==1){
pixel.setPixelColor(0,0x0000ff);
lastBuckleCheck=true;
}
if(BuckleCheck==0){
pixel.setPixelColor(0,0x0000ff);
pixel.show();
lastBuckleCheck=false;
}
}
}
void bleConnect(){
count = BLE.scan(scanResults, SCAN_RESULT_MAX);
if(count > 0){
for( i = 0; i < count; i++){
BleUuid foundServiceUuid;
size_t svcCount = scanResults[i].advertisingData().serviceUUID(&foundServiceUuid,1);
if(svcCount > 0 && foundServiceUuid == txUuid){
RSSI = scanResults[i].rssi();
peer = BLE.connect(scanResults[i].address());
}
}
}
}
void MQTT_connect() {
int8_t ret;
// Return if already connected.
if (mqtt.connected()) {
return;
}
Serial.print("Connecting to MQTT... ");
while ((ret = mqtt.connect()) != 0) { // connect will return 0 for connected
Serial.printf("Error Code %s\n",mqtt.connectErrorString(ret));
Serial.printf("Retrying MQTT connection in 5 seconds...\n");
mqtt.disconnect();
delay(5000); // wait 5 seconds and try again
}
Serial.printf("MQTT Connected!\n");
}
bool MQTT_ping() {
static unsigned int last;
bool pingStatus;
if ((millis()-last)>120000) {
Serial.printf("Pinging MQTT \n");
pingStatus = mqtt.ping();
if(!pingStatus) {
Serial.printf("Disconnecting \n");
mqtt.disconnect();
}
last = millis();
}
return pingStatus;
}
void publish(){
static int counter;
if((millis()-lastTime) > 8000) {
lastTime = millis();
if(mqtt.Update()) {
// Serial.printf("Publishing ---- %i \n",lastBuckleCheck);
if(lastBuckleCheck && peer.connected()){
pubFeedTxt.publish("Car seat in range, Seat Belt Locked");
pubFeedFR.publish(0);
pubFeedLt.publish(0);
}
if(!lastBuckleCheck && peer.connected()){
pubFeedTxt.publish("Car seat in range,Seat Belt not locked");
pubFeedFR.publish(0);
pubFeedLt.publish(0);
}
if(!peer.connected() && !lastBuckleCheck){
pubFeedTxt.publish("Car seat out of range, Seat belt not locked");
pubFeedFR.publish(1);
pubFeedLt.publish(0);
}
if(!peer.connected() && lastBuckleCheck){
pubFeedTxt.publish("DANGER!!! IS YOUR CHILD SAFE???");
pubFeedFR.publish(0);
pubFeedLt.publish(1);
}
}
}
}
void alert(){
static int i;
static float t, t2;
int sinWave, sinWave2;
pinMode(VIBRATE1,OUTPUT);
pinMode(VIBRATE2,OUTPUT);
while(true){
if(alertOn){
t = millis()/1000.0;
t2 = millis()/1000.0;
sinWave = 500*sin(2*M_PI*(2)*t)+3000;
sinWave2 = 126*sin(2*M_PI*(2)*t2)+127;
tone(BUZZER,sinWave,500);
pixel.setBrightness(sinWave2);
pixel.setPixelColor(0,0xff0000);
pixel.show();
delay(90);
noTone(BUZZER);
pixel.clear();
pixel.show();
digitalWrite(VIBRATE1,HIGH);
digitalWrite(VIBRATE2,HIGH);
}
else{
digitalWrite(VIBRATE1,LOW);
digitalWrite(VIBRATE2,LOW);
}
}
}





_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)















{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.