


Hardware components | ||||||
_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 3 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
Have you ever missed work because you didn't have any sunlight to wake you up? Have you ever rolled your blinds up and asked yourself how many better things you could be doing with your time? Have you ever had a plant die because you forgot to roll up the blinds and all the time you wasted growing your baby? Well, do I have the product for you. With these motorized blinds all your troubles will just melt away. They are completely remote controlled via a small button remote. They also track the sun and night cycles and will raise to allow the most amount of light in through the day and will close as dusk falls so no gooders cant spy into your dwelling. With all those features, who wouldn't want these blinds?
The development of the blinds took place over a total of 4 weeks and a couple all nighters. Originally, the plan called for using corded blinds then attaching a motor to the already existing rod inside. This turned out to be an issue because retailers don't sell corded blinds in stores. They must be custom ordered with around 3 week delays. This almost instantly switched our design to a cordless design with a sleeker look. Cordless blinds rely on a small flat metal spring with a specific amount of tension that allows for you to lower and raise them with one hand almost effortlessly.
The problem is this is not very conductive for building off of and does not bode well when attaching a motor to it. As a result we stripped the components of the blinds and designed our mechanism to lift the blinds. It consists of a 5/16in 20in rod that is held in place by 2 3d printed bearing holders. The bearings are there to hold weight and let rod freely spin.
On the motor end a 7mm to 3mm connecter was used to adapt motor to the rod, the rod used was ground down to fit the 7mm hole. Originally the design used a ¼ in threaded rod which is why the connecter is 7mm on one side. However, department hardware stores do not sell bearings so I bought some skateboard bearings which are a constant size and upgraded bar. Some things were scrapped like solar charging and scheduling feature.
Iot makes this problem of having non motorized blinds quite easy to solve as the iot device acts as the computer for the blinds and then just connect sensors and motors and you can turn any blinds into smart motorized blinds. The solution is novel as it allows for scheduled operation, smart operation via sunlight sensing, easy use via button remote, and future design would also operate with smart home/smartphone allowing for extreme easy of use.
VideoLink to the YouTube video: https://youtu.be/UPs5A_-fOWw
Bi-DirectionalCommunicationFlow
- Missing solar charging and smartphone app from original idea, the solar charging was due to back order/ cost and the smartphone app was axed due to limited time and limited knowledge.
- Most parts are glued in and not firmly secured, this is due to slight time crunch and issue with my 3d printer, I wanted to completely reprint top housing to fit all inside with back mount for battery and iot boards to make a clean slim hidden product. However, my 3d printer bed leveling is currently broken and I cant manually level it.
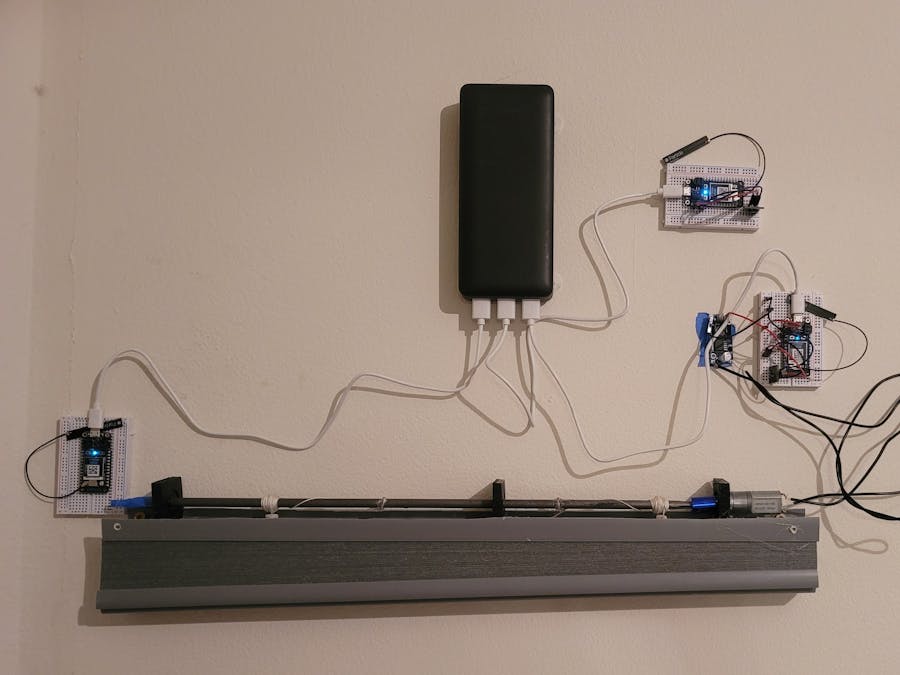
- Product is built on a wall instead of a window, this is because its an easier test bench.
LiveGraphedData
One of the great things about the particle argon is being able to transmit data from anywhere. So in our case the data from the photoresistor and the rotary encoder data are live updated to a website called think space through webhook integration. Here is a like to the live streamed data from our project and a view of what the data looks like below.






_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
Comments
Please log in or sign up to comment.