


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 3 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
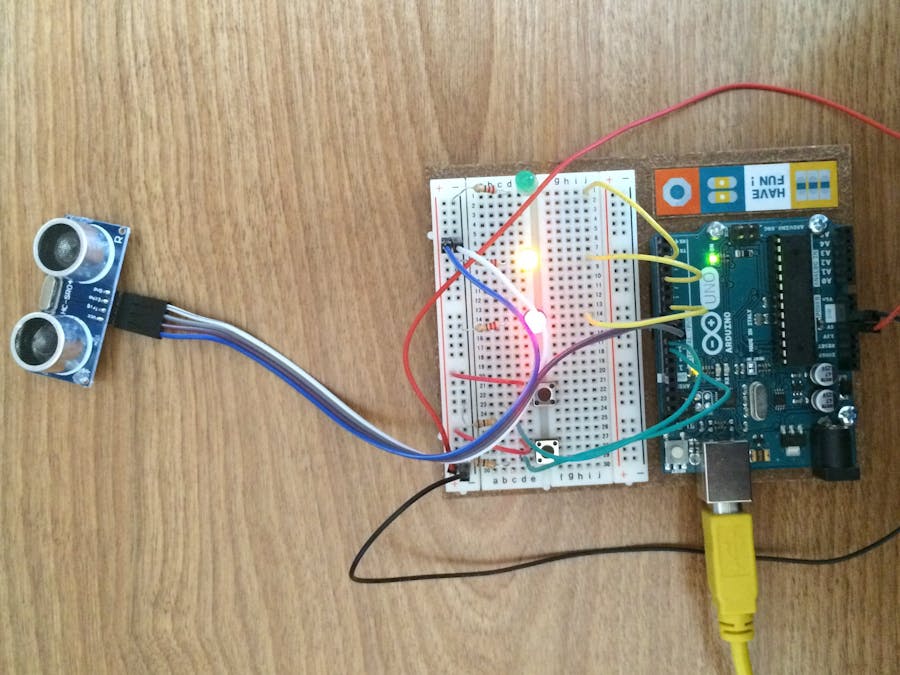
Wire Arduino with breadboard and components. Upload the .ino file to the UNO.
SetupUpon first use, there will be no saved distance settings so red and yellow LED will flash. Place an object, like your automobile, in front of the ultra-sonic sensor and press the "yellow setting" push button. Yellow LED will now be off if distance set correctly.
Now move that object closer to the sensor and press the "red setting" push button. Red LED will now be off if distance set correctly.
Move the object past the "yellow light" distance. Green LED will energize informing you it is safe to move closer to the sensor. Once the object is within the "yellow setting" distance, green will turn off and yellow LED will now energize indicating to slow down moving towards sensor.
When you've crossed into the "red light" setting, yellow will turn off and red LED will energize indicating to stop moving closer. Press and then release both buttons at the same time to clear both red and yellow distance settings.
N1.ino
Arduino//Scott Mangiacotti
//Tucson, Arizona USA
//May 2016
//N1
//Version 1.0
#include <NewPing.h>
#include <EEPROM.h>
//Constants for I/O
int const US_TRIG_PIN = 8;
int const US_ECHO_PIN = 9;
int const O_RED_LED_PIN = 7;
int const O_YELLOW_LED_PIN = 4;
int const O_GREEN_LED_PIN = 2;
int const I_RED_BUTTON_PIN = 11;
int const I_YELLOW_BUTTON_PIN = 10;
//Constants
int const DEFAULT_ILLUM_SCANS = 5; //number Loop() routine scans for LED on/off cycles
int const US_MAX_DIST = 500; //ultra-sonic sensor: 500 centimeters = 196.85 inches = 16.40 feet
//Constants for NVM save addresses
int const MEM_ADDR_RED_DIST = 0;
int const MEM_ADDR_YEL_DIST = 2;
//Global variables for the ultrasonic sensor
NewPing gSonar(US_TRIG_PIN, US_ECHO_PIN, US_MAX_DIST);
int gSonarEchoTime;
int gSonarDistance_cm;
//General and misc global variables
bool gVerboseDiagMode = false;
//Variables for the sequential LED blinking
bool gRedBlink = false;
int gRedScanCounter = 0;
bool gRedOneShot = false;
int gRedButtonState_Last = 0;
bool gYellowBlink = false;
int gYellowScanCounter = 0;
bool gYellowOneShot = false;
int gYellowButtonState_Last = 0;
bool gGreenOneShot = false;
//Variables for red and yellow distance setting/threshold
int gYellowDistance_cm = 0; //zero is invalid or not set yet
int gRedDistance_cm = 0; //zero is invalid or not set yet
//Runs once
void setup()
{
//Open a serial port
Serial.begin(9600);
//Setup digital outputs
pinMode(O_RED_LED_PIN, OUTPUT);
pinMode(O_YELLOW_LED_PIN, OUTPUT);
pinMode(O_GREEN_LED_PIN, OUTPUT);
pinMode(I_RED_BUTTON_PIN, INPUT);
pinMode(I_YELLOW_BUTTON_PIN, INPUT);
//Post product information to serial port
reportProductInfo();
//Read EEPROM stored distance settings
readSettingsFromNVM();
}
//Runs continuously
void loop()
{
//Serial port processing
if (Serial.available() > 0)
{
int iControlCode;
iControlCode = Serial.parseInt();
processSerialMessage(iControlCode);
}
//Check if red distance needs setting
if (gRedDistance_cm == 0)
{
blinkRedLED(DEFAULT_ILLUM_SCANS);
gRedOneShot = false;
}
else
{
if (gRedOneShot == false)
{
gRedOneShot = true;
digitalWrite(O_RED_LED_PIN, LOW);
}
}
//Check if yellow distance needs setting
if (gYellowDistance_cm == 0)
{
blinkYellowLED(DEFAULT_ILLUM_SCANS);
gYellowOneShot = false;
}
else
{
if (gYellowOneShot == false)
{
gYellowOneShot = true;
digitalWrite(O_YELLOW_LED_PIN, LOW);
}
}
//Ping for object distance
sonarPing();
bool bSkipObjectCheckThisScan = false;
//Read red distance setting button state
int iRedButton;
iRedButton = digitalRead(I_RED_BUTTON_PIN);
//Read yellow distance setting button state
int iYellowButton;
iYellowButton = digitalRead(I_YELLOW_BUTTON_PIN);
//Check if red button has been released (we will set distance on button_up detection)
if (iRedButton != gRedButtonState_Last && iYellowButton == gYellowButtonState_Last) //red changed, yellow no change
{
if (iRedButton == LOW && iYellowButton == LOW)
{
gRedDistance_cm = gSonarDistance_cm;
Serial.print("red LED distance set to ");
Serial.print(gRedDistance_cm);
Serial.println(" cm");
writeSettingsToNVM();
bSkipObjectCheckThisScan = true;
}
}
//Check if yellow button has been released (we will set distance on button_up detection)
if (iYellowButton != gYellowButtonState_Last && iRedButton == gRedButtonState_Last) //yellow changed, red no change
{
if (iYellowButton == LOW && iRedButton == LOW)
{
gYellowDistance_cm = gSonarDistance_cm;
Serial.print("yellow LED distance set to ");
Serial.print(gYellowDistance_cm);
Serial.println(" cm");
writeSettingsToNVM();
bSkipObjectCheckThisScan = true;
}
}
//Check if both buttons have been released (we will clear settings on button_up detection of both buttons)
if (iRedButton != gRedButtonState_Last && iYellowButton != gYellowButtonState_Last) //red changed, yellow changed
{
if (iYellowButton == LOW && iRedButton == LOW)
{
gRedDistance_cm = 0;
gYellowDistance_cm = 0;
digitalWrite(O_GREEN_LED_PIN, LOW);
Serial.println("red and yellow distance settings cleared");
writeSettingsToNVM();
bSkipObjectCheckThisScan = true;
}
}
//Set last state variable to current for next scan
gRedButtonState_Last = iRedButton;
gYellowButtonState_Last = iYellowButton;
//Check for objects if we did not act on any push button activity this scan and red, yellow distance setpoints not zero
if (bSkipObjectCheckThisScan == false && gRedDistance_cm != 0 && gYellowDistance_cm != 0)
{
checkForObjects();
}
//Give a little time back
delay(25);
}
//Ping the ultra-sonic sensor for response time
//Convert response time into distance from sensor in both centimeters and inches
//Setting and measurement checks are handled in centimeters only (inches provided for information purposes only)
void sonarPing()
{
int iSonarDist_inches = 0;
//Ping for elapsed time for response in microseconds
gSonarEchoTime = gSonar.ping();
//gSonarEchoTime = gSonar.ping_median(5); //take 5 samples
//Convert microsecond response time to centimeters
gSonarDistance_cm = gSonar.convert_cm(gSonarEchoTime);
//Convert microsecond response time to inches
iSonarDist_inches = gSonar.convert_in(gSonarEchoTime);;
//Post results
if (gVerboseDiagMode == true)
{
Serial.print("echo time: ");
Serial.print(gSonarEchoTime);
Serial.print(", cm: ");
Serial.print(gSonarDistance_cm);
Serial.print(", in: ");
Serial.print(iSonarDist_inches);
Serial.print(", ft: ");
Serial.println(iSonarDist_inches/12.0);
}
}
//Check the last ultra-sonic ping distance calculation and determine which of the three LED to energize
//based on previously set settings for red and yellow distance
void checkForObjects()
{
if (gSonarDistance_cm != 0 && gSonarDistance_cm <= gRedDistance_cm)
{ //is there an object within the pre-set distance for the red light
//Energize the red LED and de-energize yellow and green
digitalWrite(O_RED_LED_PIN, HIGH);
digitalWrite(O_YELLOW_LED_PIN, LOW);
digitalWrite(O_GREEN_LED_PIN, LOW);
Serial.println("object detected within red light distance");
}
else if (gSonarDistance_cm != 0 && gSonarDistance_cm <= gYellowDistance_cm)
{ //is there an object that is not within red light distance but is within yellow
//Energize the yellow LED and de-energize the red and green
digitalWrite(O_RED_LED_PIN, LOW);
digitalWrite(O_YELLOW_LED_PIN, HIGH);
digitalWrite(O_GREEN_LED_PIN, LOW);
Serial.println("object detected within yellow light distance");
}
else
{ //if not within red or yellow distance then energize the green light
//Energize the green LED and de-energize the yellow and red
digitalWrite(O_RED_LED_PIN, LOW);
digitalWrite(O_YELLOW_LED_PIN, LOW);
digitalWrite(O_GREEN_LED_PIN, HIGH);
}
}
//Blink the red LED based on number of scans of SBC (non-blocking)
//Input parameter is number of scans of loop() routine for the LED to remain in a state before changing
//This method allows the remainder of the program to loop and not block while waiting to change state of LED
void blinkRedLED(int iNumScansToIllum)
{
//Validate parameter
if (iNumScansToIllum <= 0)
{
iNumScansToIllum = 5;
}
//Increment
gRedScanCounter++;
//Conditional
if (gRedScanCounter >= iNumScansToIllum)
{
gRedScanCounter = 0;
//Toggle the bit used to set or reset the output to the LED
if (gRedBlink == false)
{
gRedBlink = true;
digitalWrite(O_RED_LED_PIN, HIGH);
}
else
{
gRedBlink = false;
digitalWrite(O_RED_LED_PIN, LOW);
}
}
}
//Blink the yellow LED based on number of scans of SBC (non-blocking)
//Input parameter is number of scans of loop() routine for the LED to remain in a state before changing
//This method allows the remainder of the program to loop and not block while waiting to change state of LED
void blinkYellowLED(int iNumScansToIllum)
{
//Validate parameter
if (iNumScansToIllum <= 0)
{
iNumScansToIllum = 5;
}
//Increment
gYellowScanCounter++;
//Conditional
if (gYellowScanCounter >= iNumScansToIllum)
{
gYellowScanCounter = 0;
//Toggle the bit used to set or reset the output to the LED
if (gYellowBlink == false)
{
gYellowBlink = true;
digitalWrite(O_YELLOW_LED_PIN, HIGH);
}
else
{
gYellowBlink = false;
digitalWrite(O_YELLOW_LED_PIN, LOW);
}
}
}
//Process received messages from the serial port interface
//Input parameter iControlCode is the value received from the serial port to be processed
void processSerialMessage(int iControlCode)
{
bool bMatchFound = false;
//Report what we are doing
Serial.print("processing control code: ");
Serial.println(iControlCode);
//Check for "start_diag" code
if (iControlCode == 101)
{
bMatchFound = true;
gVerboseDiagMode = true;
Serial.println("diagnostics mode started");
}
//Check for "stop_diag" code
if (iControlCode == 102)
{
bMatchFound = true;
gVerboseDiagMode = false;
Serial.println("diagnostics mode stopped");
}
//Check for "energize red LED" code
if (iControlCode == 201)
{
bMatchFound = true;
digitalWrite(O_RED_LED_PIN, HIGH);
Serial.println("red LED energized");
}
//Check for "de-energize red LED" code
if (iControlCode == 202)
{
bMatchFound = true;
digitalWrite(O_RED_LED_PIN, LOW);
Serial.println("red LED de-energized");
}
//Check for "energize yellow LED" code
if (iControlCode == 301)
{
bMatchFound = true;
digitalWrite(O_YELLOW_LED_PIN, HIGH);
Serial.println("yellow LED energized");
}
//Check for "de-energize yellow LED" code
if (iControlCode == 302)
{
bMatchFound = true;
digitalWrite(O_YELLOW_LED_PIN, LOW);
Serial.println("yellow LED de-energized");
}
//Check for "energize green LED" code
if (iControlCode == 401)
{
bMatchFound = true;
digitalWrite(O_GREEN_LED_PIN, HIGH);
Serial.println("green LED energized");
}
//Check for "de-energize green LED" code
if (iControlCode == 402)
{
bMatchFound = true;
digitalWrite(O_GREEN_LED_PIN, LOW);
Serial.println("green LED de-energized");
}
//Check for "version report" code
if (iControlCode == 501)
{
bMatchFound = true;
reportProductInfo();
}
//Report back on the same serial port if we did not find a matching/expected control code
if (bMatchFound == false)
{
Serial.println("unrecognized control code");
}
}
//Write values to EEPROM for red and yellow light distance setting
void writeSettingsToNVM()
{
int iAddr;
//Write red distance to non-volatile-memory
iAddr = 0;
EEPROM.put(iAddr, gRedDistance_cm);
//Write yellow distance to non-volatile-memory
iAddr += sizeof(int);
EEPROM.put(iAddr, gYellowDistance_cm);
//Post results
Serial.println("settings successfully saved to NVM");
}
//Read values from EEPROM for red and yellow light distance setting
void readSettingsFromNVM()
{
int iAddr;
int iVal;
//Read red distance from non-volatile-memory
iAddr = 0;
iVal = 0;
EEPROM.get(iAddr, iVal);
//Validate value
if (iVal > 0 && iVal <= US_MAX_DIST)
{
gRedDistance_cm = iVal;
Serial.print("red distance setting successfully read from NVM: ");
Serial.print(gRedDistance_cm);
Serial.println(" cm");
}
else
{
gRedDistance_cm = 0;
Serial.print("failure reading red distance setting from NVM: ");
Serial.println(iVal);
}
iAddr += sizeof(int);
iVal = 0;
EEPROM.get(iAddr, iVal);
//Validate value
if (iVal > 0 && iVal <= US_MAX_DIST)
{
gYellowDistance_cm = iVal;
Serial.print("yellow distance setting successfully read from NVM: ");
Serial.print(gYellowDistance_cm);
Serial.println(" cm");
}
else
{
gYellowDistance_cm = 0;
Serial.print("failure reading yellow distance setting from NVM: ");
Serial.println(iVal);
}
}
//Send product information to the serial port
void reportProductInfo()
{
//Report product and other information to serial port
Serial.println("N1 version 1.0");
Serial.println("by zonatec software");
Serial.println("tucson, arizona usa");
Serial.println("june 2016");
Serial.print("checksum ");
Serial.println("cef2-2a2b-7360-8519-d7f7-3c71-040e-cc6e");
}




_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


Comments
Please log in or sign up to comment.