In India, The Corona cases are increasing day by day without flattening the curve. After three months of lock down, now Unlock phase is started in many places in India. People started wearing masks and sanitizer bottles are available in all the shops nowadays.
In many developing nations like India, auto dispenser sanitizer is very rarely used. In most of the shops, Sanitizer bottles are available, where we need to take it in our hand and use it.
I saw a little girl using a hand sanitizer in shop, where she pressed a sanitizer bottle using two of her fingers but she rub the sanitizer only in palm, where I can notice the sanitizer doesn't spread through her entire hands.
Many of the kids in poverty zone doesn't aware about how to use hand sanitizer properly, in the mid of pandemic time. I planned to develop a device which is very low cost and can be fitted into any sanitizer bottle. So it can be easily used in any shops.
The servo motor is tied to the sanitizer bottle using a rubber band . Since rubber band is flexible and easily stretched to fit into any size and shape of sanitizer bottles.
A rope tied to servo motor rotor is tied to the nozzle of the sanitizer bottle in other end. When the rotor starts rotating , the pressure creates on nozzle of the sanitizer bottle which presses down .
Conclusion
My project idea is to make cost effective ,easily portable and can fitted in to any shape and size of sanitizer bottle to make it Touch less Sanitizer bottles.
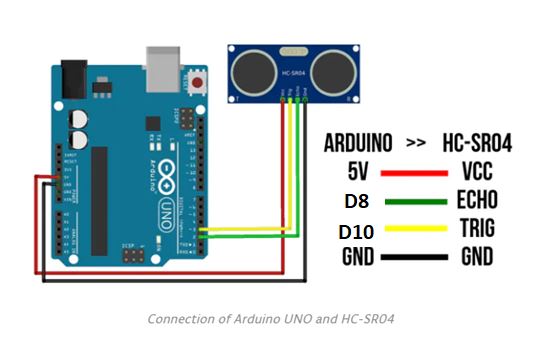
Paste this code in Arduino uno and connect Pin 10 of arduino -> Trigger pin of Ultrasonic sensor and Pin 8 of arduino -> Echo pin of ultrasonic sensor
#include <Servo.h> Servo myservo; // create servo object to control a servo
int val; // variable to read the value from the analog pin
const int pingPin=10; // Trigger Pin of Ultrasonic Sensor
const int echoPin=8; // Echo Pin of Ultrasonic Sensor
void setup(){ myservo.attach(9); // attaches the servo on pin 9 to the servo object
Serial.begin(9600); // Starting Serial Terminal
}void loop(){ // reads the value of the potentiometer (value between 0 and 1023) // scale it to use it with the servo (value between 0 and 180)int angle=0;long duration, inches, cm; pinMode(pingPin, OUTPUT); digitalWrite(pingPin, LOW); delayMicroseconds(2); digitalWrite(pingPin, HIGH); delayMicroseconds(10); digitalWrite(pingPin, LOW); pinMode(echoPin, INPUT);duration= pulseIn(echoPin, HIGH);inches= microsecondsToInches(duration);cm= microsecondsToCentimeters(duration); //Serial.print(inches); //Serial.print("in, "); Serial.println(cm);if(cm<12) //hand is placed near sensor
{ delay(10);for(angle=0; angle < 180;angle+=1) // command to move from 0 degrees to 180 degrees //pressing sanitizer
{ myservo.write(angle); //command to rotate the servo to the specified angle
Serial.println(angle);} delay(10);for(angle=180; angle>=1; angle-=10) // command to move from 180 degrees to 0 degrees // removing the pressure in sanitizer bottle
{ myservo.write(angle); //command to rotate the servo to the specified angle
Serial.println(angle);}}else{ Serial.print("cm "); Serial.println(cm); myservo.write(0); //command to rotate the servo to the specified angle
}}long microsecondsToInches(long microseconds){return microseconds / 74 / 2;}long microsecondsToCentimeters(long microseconds){return microseconds / 29 / 2;}
















{kind=link}
Comments