//Include the cmath library to use functions like pow(a,b) which raises a to the bth power
#include <cmath>
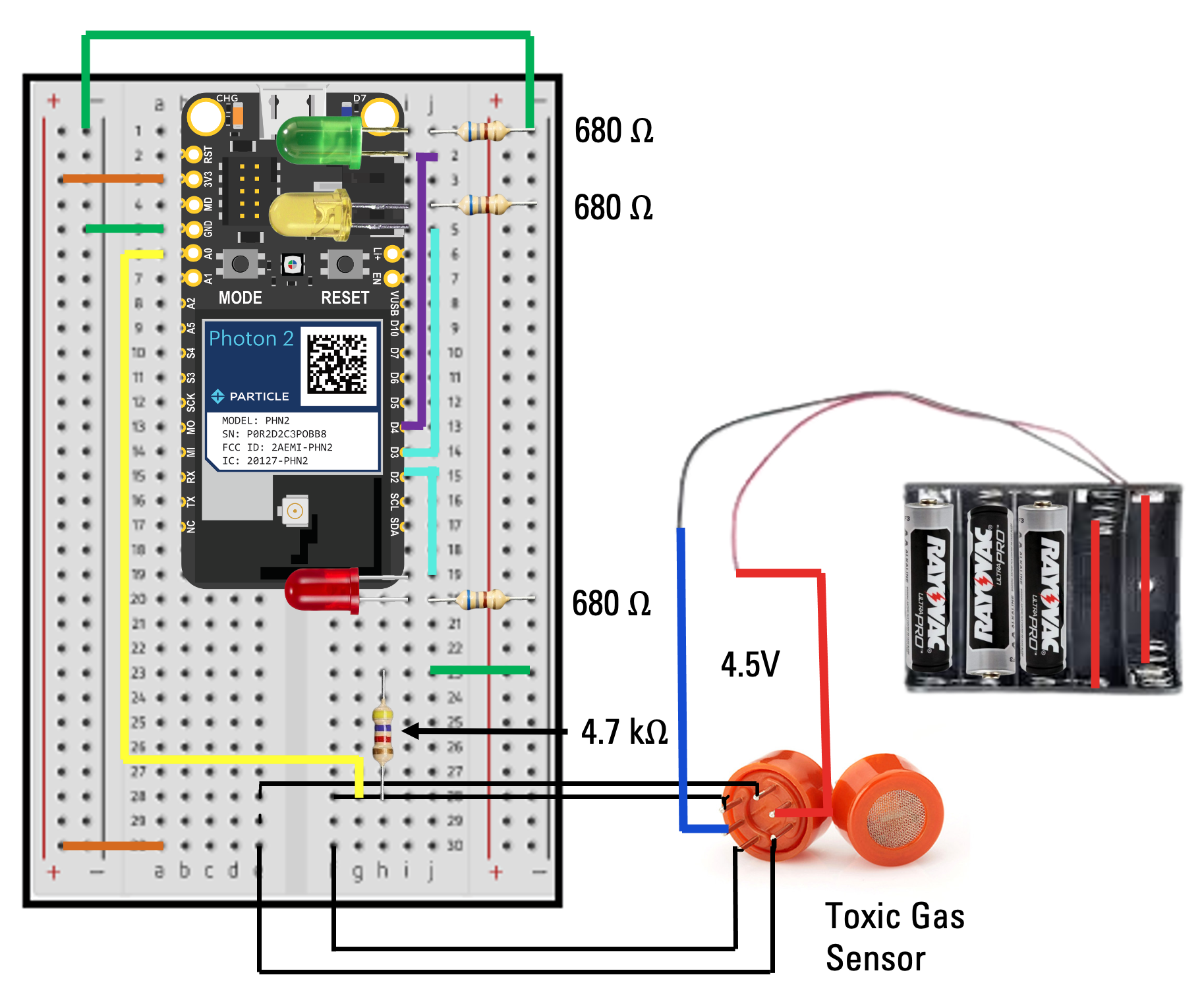
//Create a variable loadvoltage which reads and stores the analog voltage difference between pin A0 and GND
double loadvoltage = A0;
//Create a variable analogvalue which will be used to read the load voltage stored in loadvoltage
double analogvalue;
//Create a variable rsro which will represent the ratio of the sensor resistance to the resting sensor resistance
double rsro;
//Create a variabel co which will store the value of carbon monoxide concentration in ppm
double co;
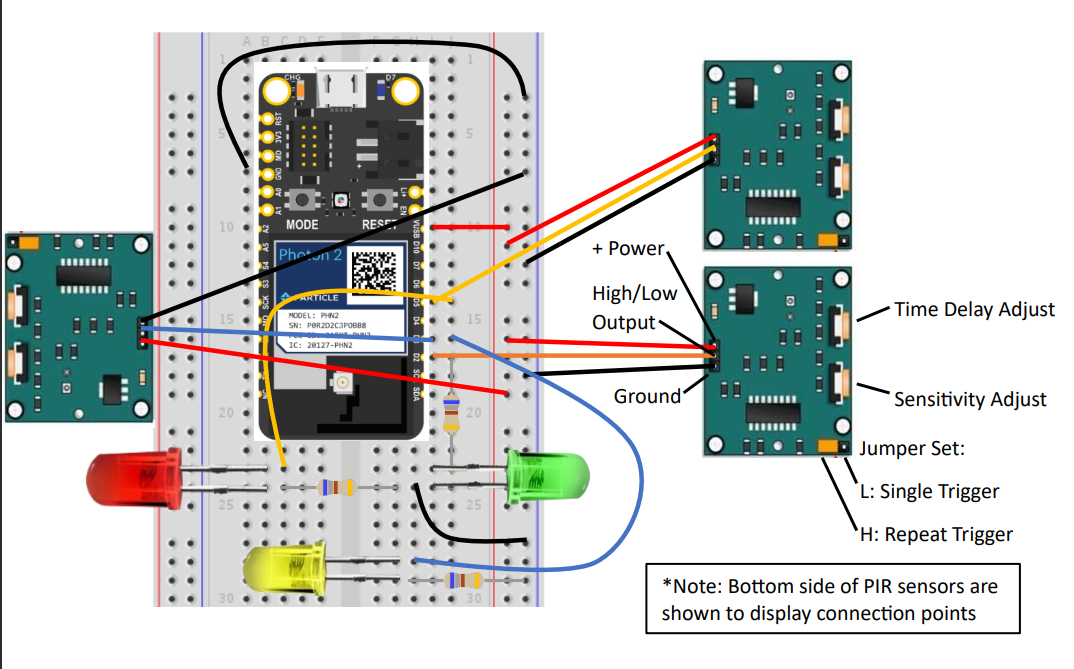
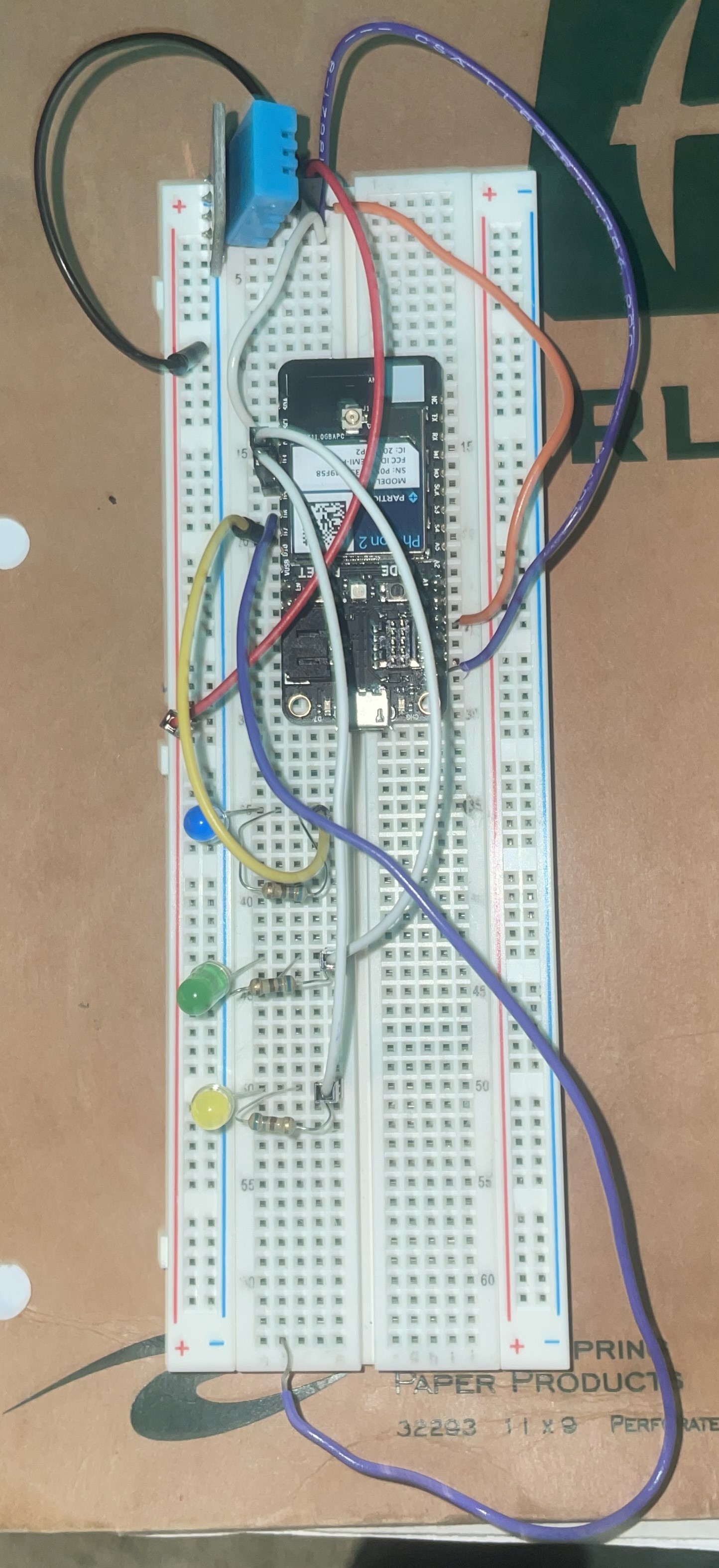
//Create a variable LED which will represent the pin D2 on the photon2
int LED = D2;
//Create a variable MOT which will represent the pin D3 on the photon2
int MOT = D3;
//Create a variable TEM which will represent the pin D4 on the photon2
//int TEM = D4;
void setup() {
//Create a particle variables for analogvalue, co, and rsro, so they can be called upon
Particle.variable("analogvalue", &analogvalue, DOUBLE);
Particle.variable("co concentration", &co, DOUBLE);
Particle.variable("rsro", &rsro, DOUBLE);
//Set the pin mode of the A0 pin which is now named loadvoltage as an Input
pinMode(loadvoltage,INPUT);
//Set the pin connected to the LED (pin D2) as an output
pinMode(LED,OUTPUT);
//Set the pin connected to the motion LED (pin D3) as an output
pinMode(MOT,OUTPUT);
//Set the pin connected to the temperature LED (pin D4) as an output
pinMode(TEM,OUTPUT);
//Subscribe to the trigger Motion
Particle.subscribe("Motion", motionHandler);
//Subscribe to the trigger Temp
//Particle.subscribe("Temp", tempHandler);
}
void loop() {
//Set analogvalue to the value of the loadvoltage
analogvalue = analogRead(loadvoltage);
//Publish the value of loadvoltage to the console
// Particle.publish("load voltage", String(analogvalue));
// delay(1000);
//Perform the calibration calculation for rsro
rsro = 4617.0000000000000*((3316.0000000000000-analogvalue)/1000.0000000000000)/(analogvalue/1000.0000000000000)/10000.0000000000000;
//Perform the calibration calculation for co
co = pow(rsro/0.9623000000000, -1.0000000000000/0.5860000000000);
//Publish the value of co to the console
// Particle.publish("co concentration", String(co));
// delay(1000);
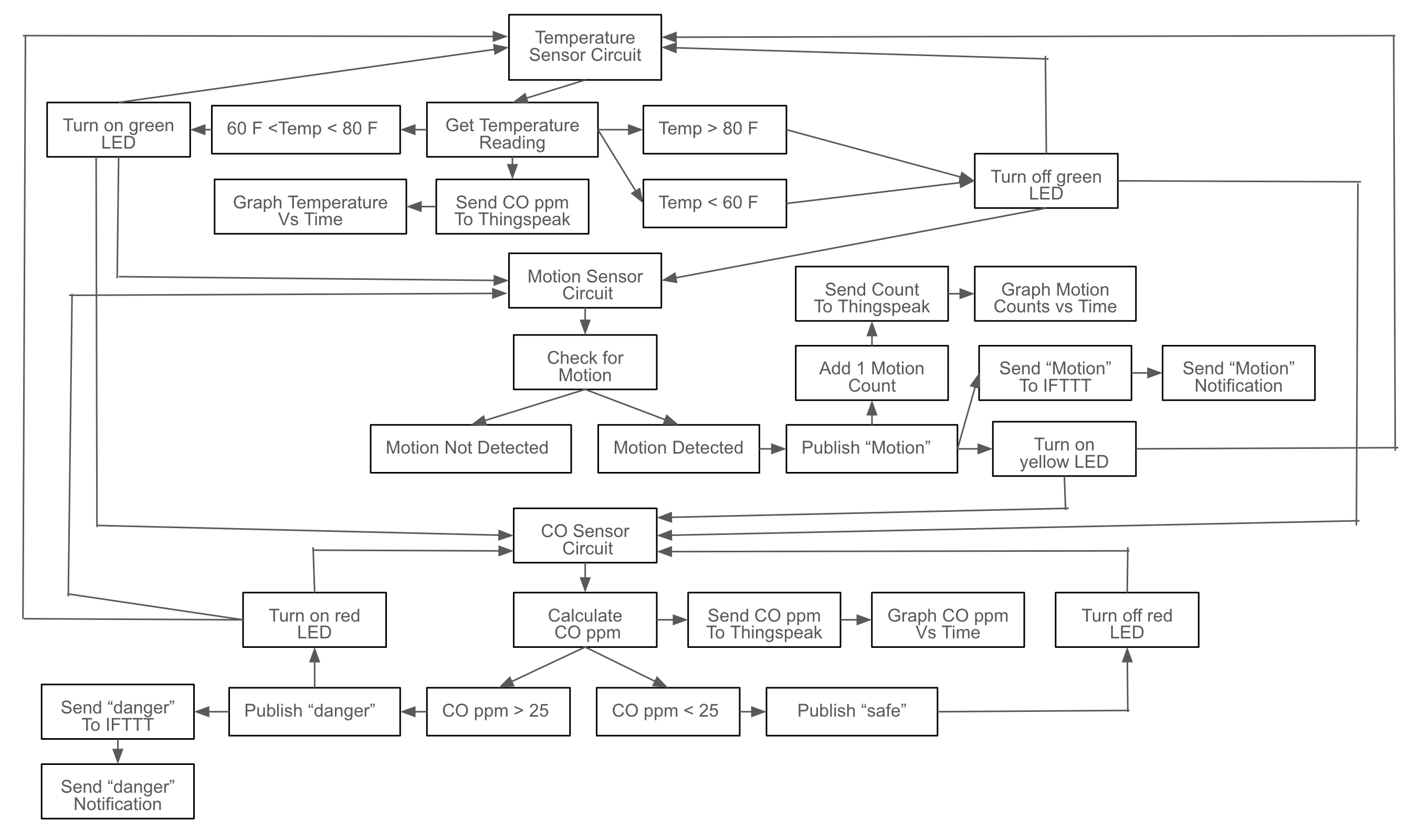
//If co concentration is above 25ppm publish danger to the cloud and turn on the led connected to pin D2
if (co > 25) {
Particle.publish("danger", "co levels are dangerously high");
digitalWrite(LED, HIGH);
}
//If co concentration is below 25ppm publish safe to the cloud and turn off the led connected to pin D2
if (co < 25) {
Particle.publish("safe", "co levels are safe");
digitalWrite(LED, LOW);
}
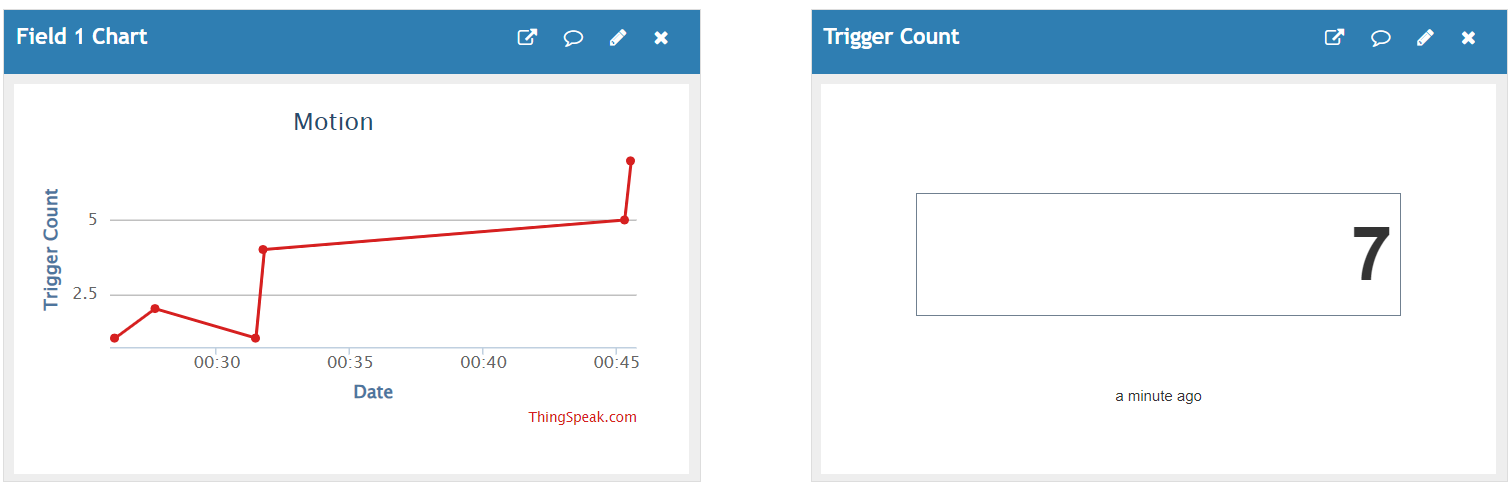
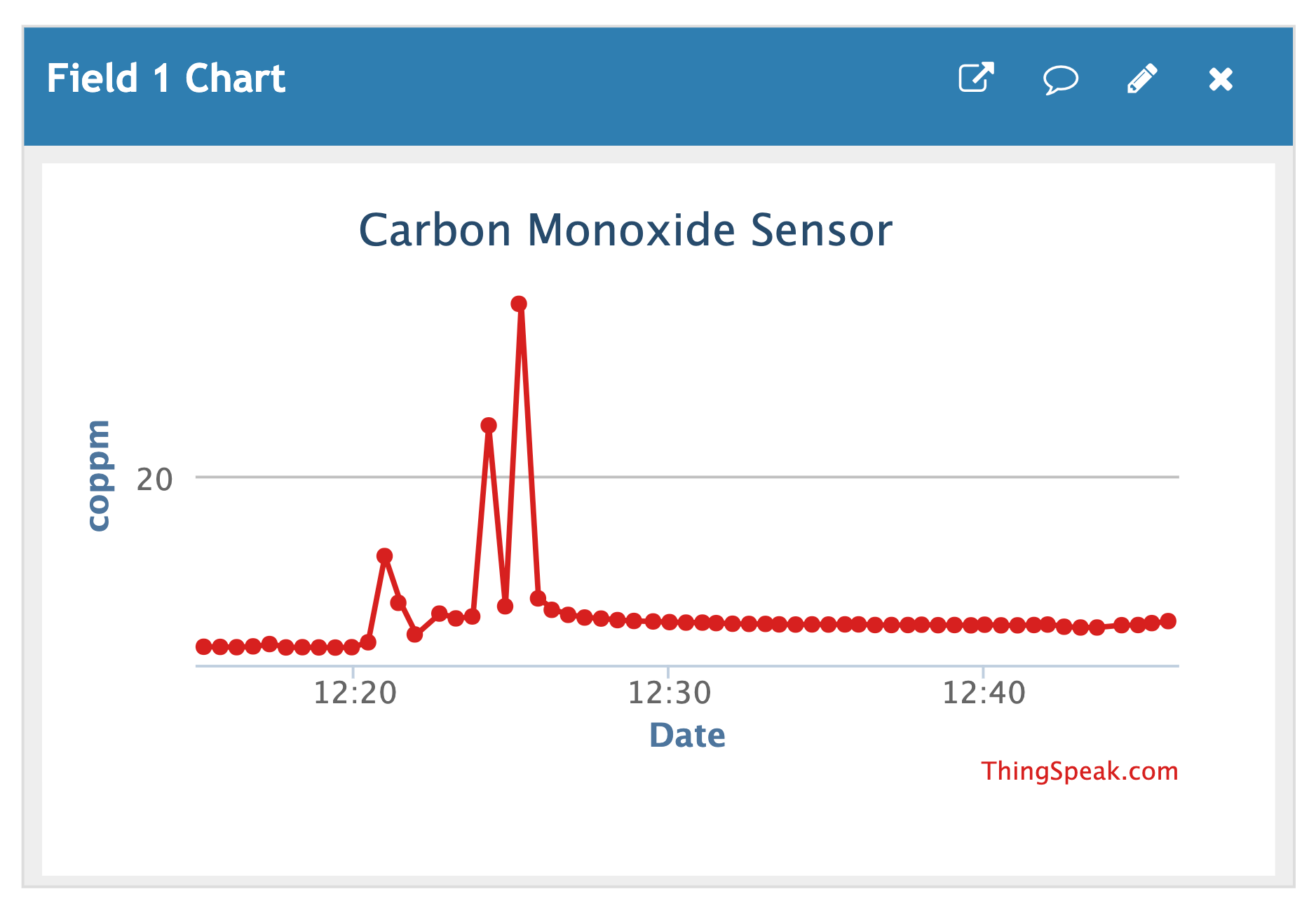
// Get some data
String coppm = String(co);
// Trigger the integration to send the co value to thingspeak using a webhook
Particle.publish("coppm", coppm);
// Wait 30 seconds
delay(30000);
}
//Create a function motionHandler which will execute when the trigger "Motion" is published by photon2_gt0
void motionHandler(const char *event, const char *data)
{
//Turn the motion LED on
digitalWrite(MOT, HIGH);
//Wait 2 seconds
delay(2000);
//Turn the motion LED off
digitalWrite(MOT, LOW);
}
//Create a function tempHandler which will execute when the trigger "Temp" is published by
//void tempHandler(const char *event, const char *data)
//{
//Turn the temperature LED on
//digitalWrite(TEM, HIGH);
//Wait 2 seconds
//delay(2000);
//Turn the temperature LED off
//digitalWrite(TEM, Low);
//}


















_fNRGpMWT1V.png)









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
_fNRGpMWT1V.png){kind=link}
Comments