
Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
The Etch A Sketch is a drawing toy with a thick, flat gray screen in a red plastic frame. There are two white knobs on the front of the frame in the lower corners. Twisting the knobs moves a stylus that displaces aluminum powder on the back of the screen, leaving a solid line. - wikipedia
This toy is basically a simple two-axis plotter, so with a few geared DC motors, you can easily add additional functionality using a joystick (or Wii remote) to control it.
Materials:
- Arduino - https://amzn.to/2DLjxR2 (I used a Nano instead)
- Breadboard - https://amzn.to/2RYqiSK
- Jumper wires - https://amzn.to/2Q7kiKc
- Wii Nunchuck: https://amzn.to/2qWBpQM
- Etch A Sketch: https://amzn.to/2LTSy76
- DC motors: https://amzn.to/2SMaaol
- H-bridge: https://amzn.to/2DXFw7y
- Some 3D-printed parts
As an Amazon Associate I earn from qualifying purchases.
Step 1: Physical BuildI made a simple frame out of cardboard and hot glue, but I ended up 3D-printing an adapter piece for the motor. Here's how to build it:
- Print two adapter pieces (file is below)
- Fit the motors in place - you may need to use a heat gun or blow drier to help it fit
- Cut and glue pieces of cardboard around the motors to hold them at a 90° angle, make sure they can't move around
- Attach a breadboard, battery holder, and a place for the Wii remote to rest
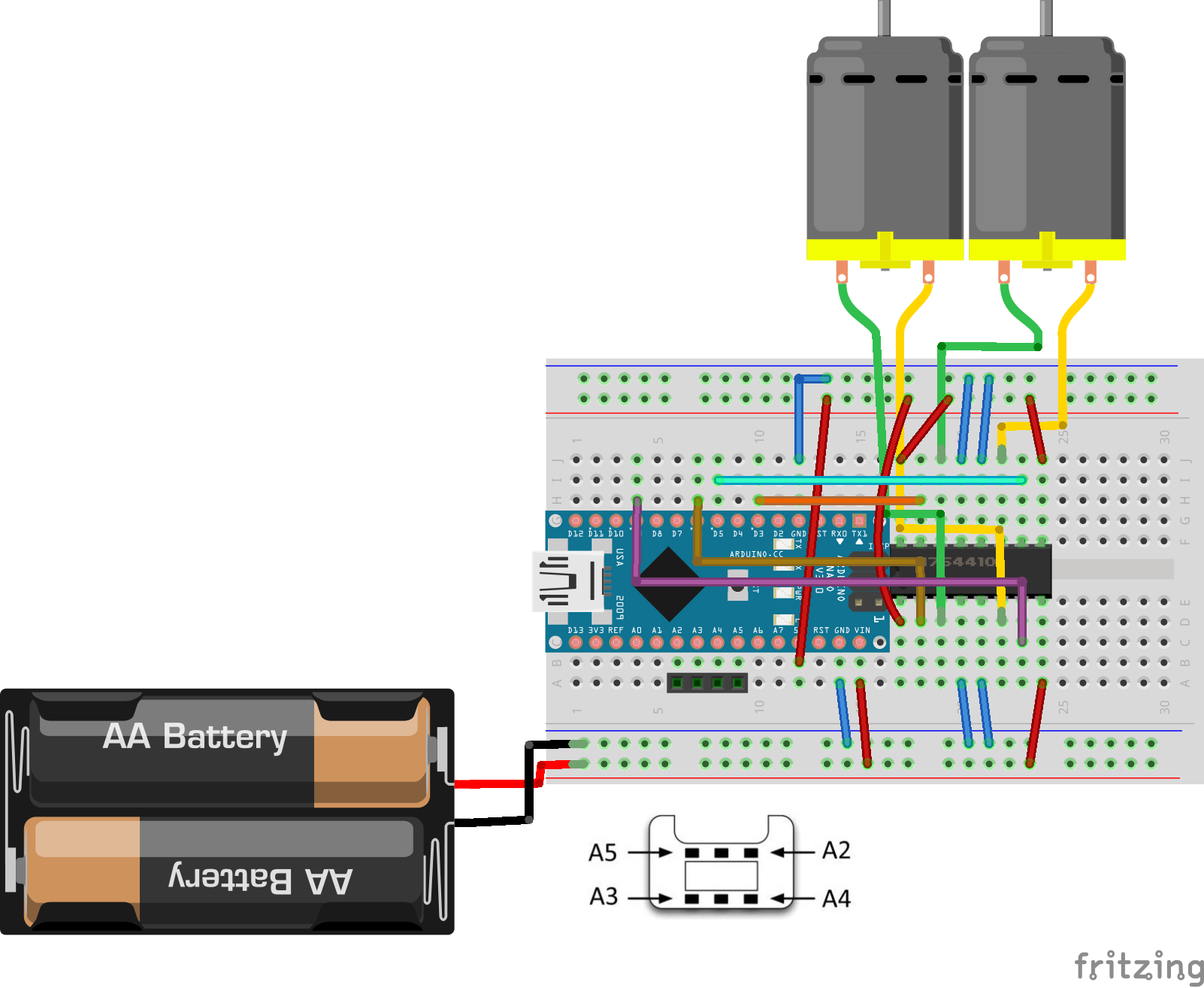
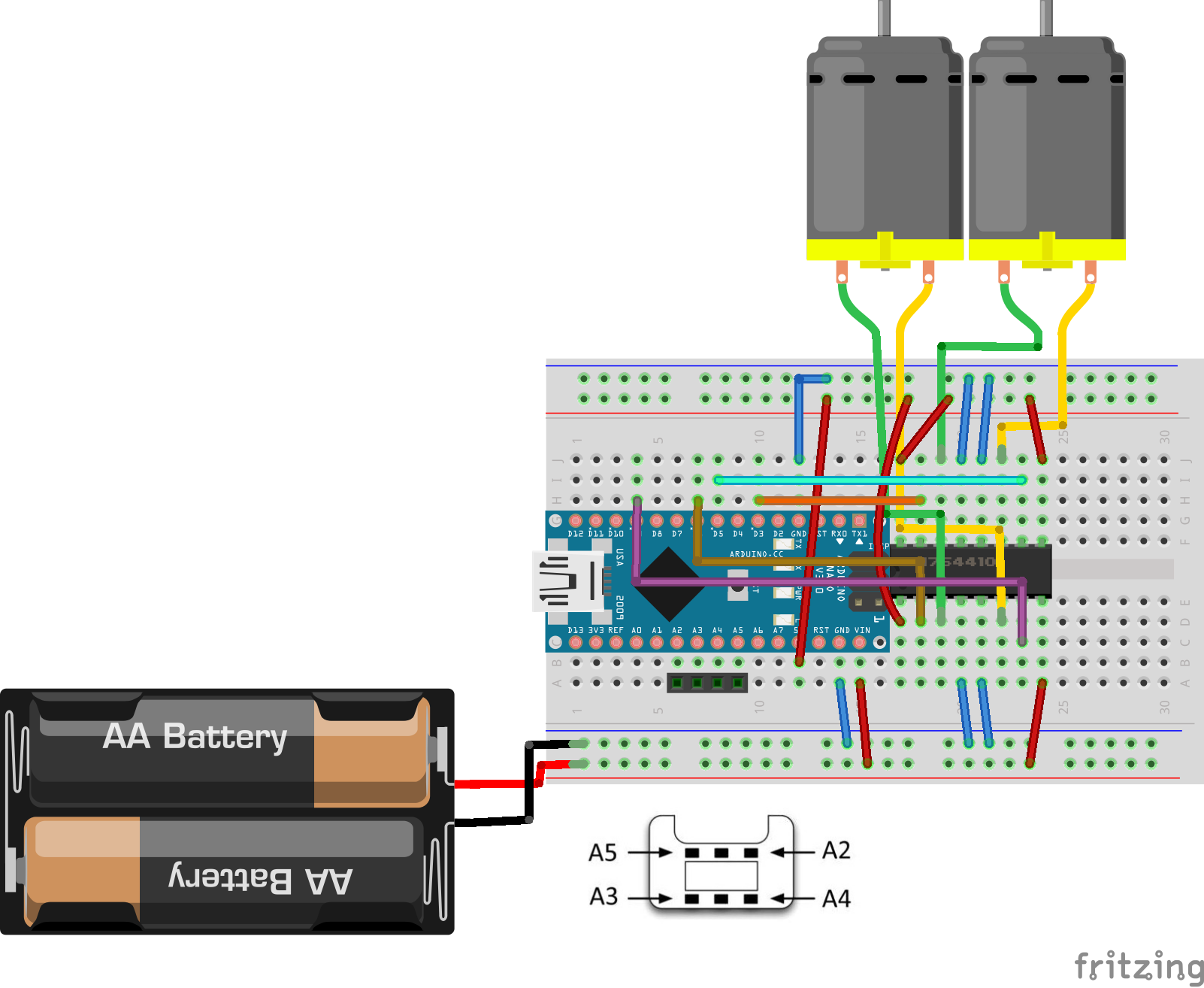
Make the circuit as shown above:
- You may want to use a higher voltage battery than shown
- More information about using a Wii remote with Arduino
Upload this code in the Arduino IDE (Wii remote functions from Tod Kurt's library):
#include <Wire.h>
#if (ARDUINO >= 100)
#include <Arduino.h>
#else
#include <WProgram.h>
//#define Wire.write(x) Wire.send(x)
//#define Wire.read() Wire.receive()
#endif
static uint8_t nunchuck_buf[6]; // array to store nunchuck data,
// Uses port C (analog in) pins as power & ground for Nunchuck
static void nunchuck_setpowerpins() {
#define pwrpin PORTC3
#define gndpin PORTC2
DDRC |= _BV(pwrpin) | _BV(gndpin);
PORTC &= ~ _BV(gndpin);
PORTC |= _BV(pwrpin);
delay(100); // wait for things to stabilize
}
// initialize the I2C system, join the I2C bus,
// and tell the nunchuck we're talking to it
static void nunchuck_init() {
Wire.begin(); // join i2c bus as master
Wire.beginTransmission(0x52);// transmit to device 0x52
#if (ARDUINO >= 100)
Wire.write((uint8_t)0x40);// sends memory address
Wire.write((uint8_t)0x00);// sends sent a zero.
#else
Wire.send((uint8_t)0x40);// sends memory address
Wire.send((uint8_t)0x00);// sends sent a zero.
#endif
Wire.endTransmission();// stop transmitting
}
// Send a request for data to the nunchuck
// was "send_zero()"
static void nunchuck_send_request() {
Wire.beginTransmission(0x52);// transmit to device 0x52
#if (ARDUINO >= 100)
Wire.write((uint8_t)0x00);// sends one byte
#else
Wire.send((uint8_t)0x00);// sends one byte
#endif
Wire.endTransmission();// stop transmitting
}
// Encode data to format that most wiimote drivers except
// only needed if you use one of the regular wiimote drivers
static char nunchuk_decode_byte (char x) {
x = (x ^ 0x17) + 0x17;
return x;
}
// Receive data back from the nunchuck,
// returns 1 on successful read. returns 0 on failure
static int nunchuck_get_data() {
int cnt = 0;
Wire.requestFrom (0x52, 6);// request data from nunchuck
while (Wire.available ()) {
// receive byte as an integer
#if (ARDUINO >= 100)
nunchuck_buf[cnt] = nunchuk_decode_byte( Wire.read() );
#else
nunchuck_buf[cnt] = nunchuk_decode_byte( Wire.receive() );
#endif
cnt++;
}
nunchuck_send_request(); // send request for next data payload
// If we recieved the 6 bytes, then go print them
if (cnt >= 5) {
return 1; // success
}
return 0; //failure
}
// Print the input data we have recieved
// accel data is 10 bits long
// so we read 8 bits, then we have to add
// on the last 2 bits. That is why I
// multiply them by 2 * 2
static void nunchuck_print_data() {
static int i = 0;
int joy_x_axis = nunchuck_buf[0];
int joy_y_axis = nunchuck_buf[1];
int accel_x_axis = nunchuck_buf[2]; // * 2 * 2;
int accel_y_axis = nunchuck_buf[3]; // * 2 * 2;
int accel_z_axis = nunchuck_buf[4]; // * 2 * 2;
int z_button = 0;
int c_button = 0;
// byte nunchuck_buf[5] contains bits for z and c buttons
// it also contains the least significant bits for the accelerometer data
// so we have to check each bit of byte outbuf[5]
if ((nunchuck_buf[5] >> 0) & 1)
z_button = 1;
if ((nunchuck_buf[5] >> 1) & 1)
c_button = 1;
if ((nunchuck_buf[5] >> 2) & 1)
accel_x_axis += 1;
if ((nunchuck_buf[5] >> 3) & 1)
accel_x_axis += 2;
if ((nunchuck_buf[5] >> 4) & 1)
accel_y_axis += 1;
if ((nunchuck_buf[5] >> 5) & 1)
accel_y_axis += 2;
if ((nunchuck_buf[5] >> 6) & 1)
accel_z_axis += 1;
if ((nunchuck_buf[5] >> 7) & 1)
accel_z_axis += 2;
Serial.print(i, DEC);
Serial.print("\t");
Serial.print("joy:");
Serial.print(joy_x_axis, DEC);
Serial.print(",");
Serial.print(joy_y_axis, DEC);
Serial.print(" \t");
Serial.print("acc:");
Serial.print(accel_x_axis, DEC);
Serial.print(",");
Serial.print(accel_y_axis, DEC);
Serial.print(",");
Serial.print(accel_z_axis, DEC);
Serial.print("\t");
Serial.print("but:");
Serial.print(z_button, DEC);
Serial.print(",");
Serial.print(c_button, DEC);
Serial.print("\r\n"); // newline
i++;
}
// returns zbutton state: 1=pressed, 0=notpressed
static int nunchuck_zbutton() {
return ((nunchuck_buf[5] >> 0) & 1) ? 0 : 1; // voodoo
}
// returns zbutton state: 1=pressed, 0=notpressed
static int nunchuck_cbutton() {
return ((nunchuck_buf[5] >> 1) & 1) ? 0 : 1; // voodoo
}
// returns value of x-axis joystick
static int nunchuck_joyx() {
return nunchuck_buf[0];
}
// returns value of y-axis joystick
static int nunchuck_joyy() {
return nunchuck_buf[1];
}
// returns value of x-axis accelerometer
static int nunchuck_accelx() {
return nunchuck_buf[2]; // FIXME: this leaves out 2-bits of the data
}
// returns value of y-axis accelerometer
static int nunchuck_accely() {
return nunchuck_buf[3]; // FIXME: this leaves out 2-bits of the data
}
// returns value of z-axis accelerometer
static int nunchuck_accelz() {
return nunchuck_buf[4]; // FIXME: this leaves out 2-bits of the data
}
int loop_cnt = 0;
byte joyx, joyy, zbut, cbut, accx, accy, accz;
void _print() {
Serial.print("\tX Joy: ");
Serial.print(map(joyx, 15, 221, 0, 255));
Serial.print("\tY Joy: ");
Serial.println(map(joyy, 29, 229, 0, 255));
}
int joyx1 = 129; // 15 - 221
int joyy1 = 124; // 29 - 229
void setup() {
Serial.begin(9600);
nunchuck_setpowerpins();
nunchuck_init(); // send the initilization handshake
Serial.println("Wii Nunchuck Ready");
pinMode(3, OUTPUT);
pinMode(5, OUTPUT);
pinMode(6, OUTPUT);
pinMode(9, OUTPUT);
//type();
}
void loop() {
if ( loop_cnt > 10 ) { // every 100 msecs get new data
loop_cnt = 0;
nunchuck_get_data();
zbut = nunchuck_zbutton();
joyx = nunchuck_joyx(); // 15 - 221
joyy = nunchuck_joyy(); // 29 - 229
_print();
}
loop_cnt++;
if (zbut == 1) {
type();
zbut = 0;
}
else {
if (joyx > (joyx1 + 20)) {
int speed1 = map(joyx - joyx1, 0, 80, 40, 255);
speed1 = constrain(speed1, 0, 255);
analogWrite(6, 0);
analogWrite(9, speed1);
}
else if (joyx < (joyx1 - 20)) {
int speed2 = map(joyx1 - joyx, 0, 90, 40, 255);
speed2 = constrain(speed2, 0, 255);
analogWrite(6, speed2);
analogWrite(9, 0);
}
else {
analogWrite(6, 0);
analogWrite(9, 0);
}
if (joyy > (joyy1 + 20)) {
int speed3 = map(joyy - joyy1, 0, 80, 40, 255);
speed3 = constrain(speed3, 0, 255);
analogWrite(3, 0);
analogWrite(5, speed3);
}
else if (joyy < (joyy1 - 20)) {
int speed4 = map(joyy1 - joyy, 0, 90, 40, 255);
speed4 = constrain(speed4, 0, 255);
analogWrite(3, speed4);
analogWrite(5, 0);
}
else {
analogWrite(3, 0);
analogWrite(5, 0);
}
}
delay(1);
}
void type() {
int rltime = 200;
//digitalWrite(6, 1);//origin
//digitalWrite(9, 0);
//digitalWrite(3, 1);
//digitalWrite(5, 0);
//delay(1000);
//H==============
//digitalWrite(3, 0);//wait
//digitalWrite(5, 0);
//digitalWrite(6, 0);
//digitalWrite(9, 0);
//delay(250);
//digitalWrite(3, 0);//up
digitalWrite(5, 1);
delay(500);
digitalWrite(3, 0);//wait
digitalWrite(5, 0);
digitalWrite(6, 0);
digitalWrite(9, 0);
delay(250);
digitalWrite(3, 1);//down
//digitalWrite(5, 0);
delay(250);
digitalWrite(3, 0);//wait
digitalWrite(5, 0);
digitalWrite(6, 0);
digitalWrite(9, 0);
delay(250);
//digitalWrite(6, 0);//right
digitalWrite(9, 1);
delay(rltime);
digitalWrite(3, 0);//wait
digitalWrite(5, 0);
digitalWrite(6, 0);
digitalWrite(9, 0);
delay(250);
//digitalWrite(3, 0);//up
digitalWrite(5, 1);
delay(250);
digitalWrite(3, 0);//wait
digitalWrite(5, 0);
digitalWrite(6, 0);
digitalWrite(9, 0);
delay(250);
digitalWrite(3, 1);//down
//digitalWrite(5, 0);
delay(500);
digitalWrite(3, 0);//wait
digitalWrite(5, 0);
digitalWrite(6, 0);
digitalWrite(9, 0);
delay(250);
//digitalWrite(6, 0);//right
digitalWrite(9, 1);
delay(rltime);
//I========================
digitalWrite(3, 0);//wait
digitalWrite(5, 0);
digitalWrite(6, 0);
digitalWrite(9, 0);
delay(250);
digitalWrite(3, 0);//up
digitalWrite(5, 1);
delay(500);
digitalWrite(3, 0);//wait
digitalWrite(5, 0);
digitalWrite(6, 0);
digitalWrite(9, 0);
delay(250);
digitalWrite(6, 0);//right
digitalWrite(9, 1);
delay(100);
digitalWrite(3, 0);//wait
digitalWrite(5, 0);
digitalWrite(6, 0);
digitalWrite(9, 0);
delay(250);
digitalWrite(6, 1);//left
digitalWrite(9, 0);
delay(rltime);
digitalWrite(3, 0);//wait
digitalWrite(5, 0);
digitalWrite(6, 0);
digitalWrite(9, 0);
delay(250);
digitalWrite(6, 0);//right
digitalWrite(9, 1);
delay(100);
digitalWrite(3, 0);//wait
digitalWrite(5, 0);
digitalWrite(6, 0);
digitalWrite(9, 0);
delay(250);
digitalWrite(3, 1);//down
digitalWrite(5, 0);
delay(500);
digitalWrite(3, 0);//wait
digitalWrite(5, 0);
digitalWrite(6, 0);
digitalWrite(9, 0);
delay(250);
digitalWrite(6, 0);//right
digitalWrite(9, 1);
delay(100);
digitalWrite(3, 0);//wait
digitalWrite(5, 0);
digitalWrite(6, 0);
digitalWrite(9, 0);
delay(250);
digitalWrite(6, 1);//left
digitalWrite(9, 0);
delay(rltime);
digitalWrite(3, 0);//wait
digitalWrite(5, 0);
digitalWrite(6, 0);
digitalWrite(9, 0);
delay(250);
}
Turn on the device:
- Plug in the controller
- Attach the battery
Make sure everything is oriented correctly: the x axis motor should respond to the x axis of the controller, the motors should travel the direction you want them to, etc... - if something seems off, just power everything down and switch some motor wires around.
Once everything is working, control should be relatively intuitive:
- Control direction and speed with the joystick
- Press the "z" button to spell out "
HI" (pre-programmed)
Here are a few other things you can try:
- Use a different controller (maybe an accelerometer for tilt control)
- Replace the gear motors with steppers for greater accuracy
- Make a program to draw pre-programmed pictures
- Add a tilt mechanism to allow for automatic erasing




{kind=link}
Comments