


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 14 | ||||
| × | 6 | ||||
| × | 5 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
|
| |||||
http://www.donluc.com/?p=1969
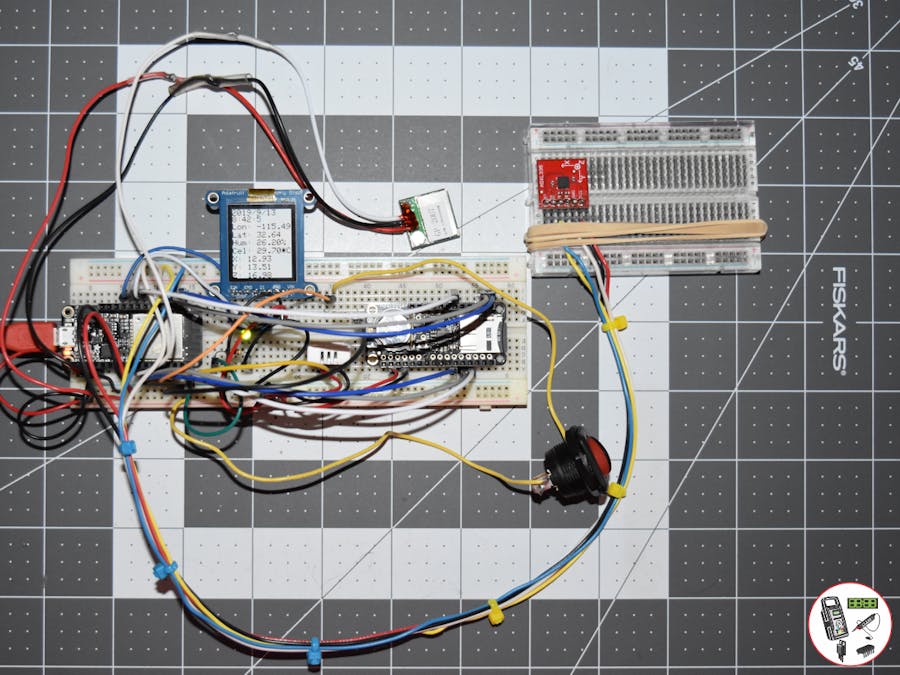
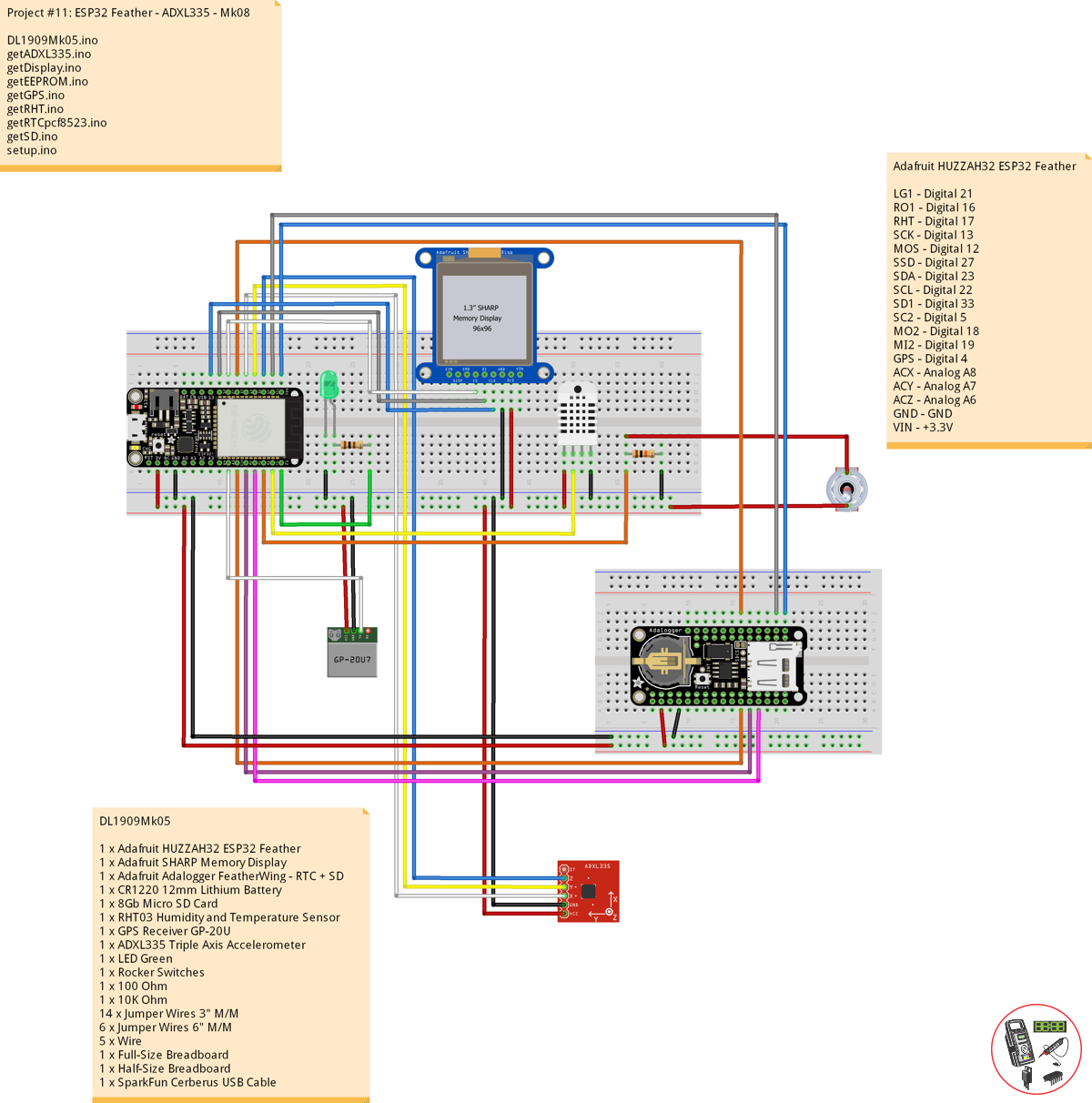
ADXL335 Triple Axis AccelerometerBreakout board for the 3 axis ADXL335 from Analog Devices. This is the latest in a long, proven line of analog sensors - the holy grail of accelerometers. The ADXL335 is a triple axis MEMS accelerometer with extremely low noise and power consumption - only 320uA! The sensor has a full sensing range of +/-3g.
1 x Adafruit HUZZAH32 ESP32 Feather
1 x Adafruit SHARP Memory Display
1 x Adafruit Adalogger FeatherWing - RTC + SD
1 x CR1220 12mm Lithium Battery
1 x 8Gb Micro SD Card
1 x RHT03 Humidity and Temperature Sensor
1 x GPS Receiver GP-20U
1 x ADXL335 Triple Axis Accelerometer
1 x LED Green
1 x Rocker Switches
1 x 100 Ohm
1 x 10K Ohm
14 x Jumper Wires 3" M/M
6 x Jumper Wires 6" M/M
5 x Wire
1 x Full-Size Breadboard
1 x Half-Size Breadboard
1 x SparkFun Cerberus USB Cable
LG1 - Digital 21
RO1 - Digital 16
RHT - Digital 17
SCK - Digital 13
MOS - Digital 12
SSD - Digital 27
SDA - Digital 23
SCL - Digital 22
SD1 - Digital 33
SC2 - Digital 5
MO2 - Digital 18
MI2 - Digital 19
GPS - Digital 4
ACX - Analog A8
ACY - Analog A7
ACZ - Analog A6
GND - GND
VIN - +3.3V
http://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web:http://www.jlpconsultants.com/
Web:http://www.donluc.com/DLHackster/
Web:https://www.hackster.io/neosteam-labs
YouTube:https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Facebook: https://www.facebook.com/neosteam.labs.9/
Instagram:https://www.instagram.com/neosteamlabs/
Pinterest:https://www.pinterest.com/NeoSteamLabs/
Twitter:https://twitter.com/labs_steam
Etsy:https://www.etsy.com/shop/NeoSteamLabs
Don Luc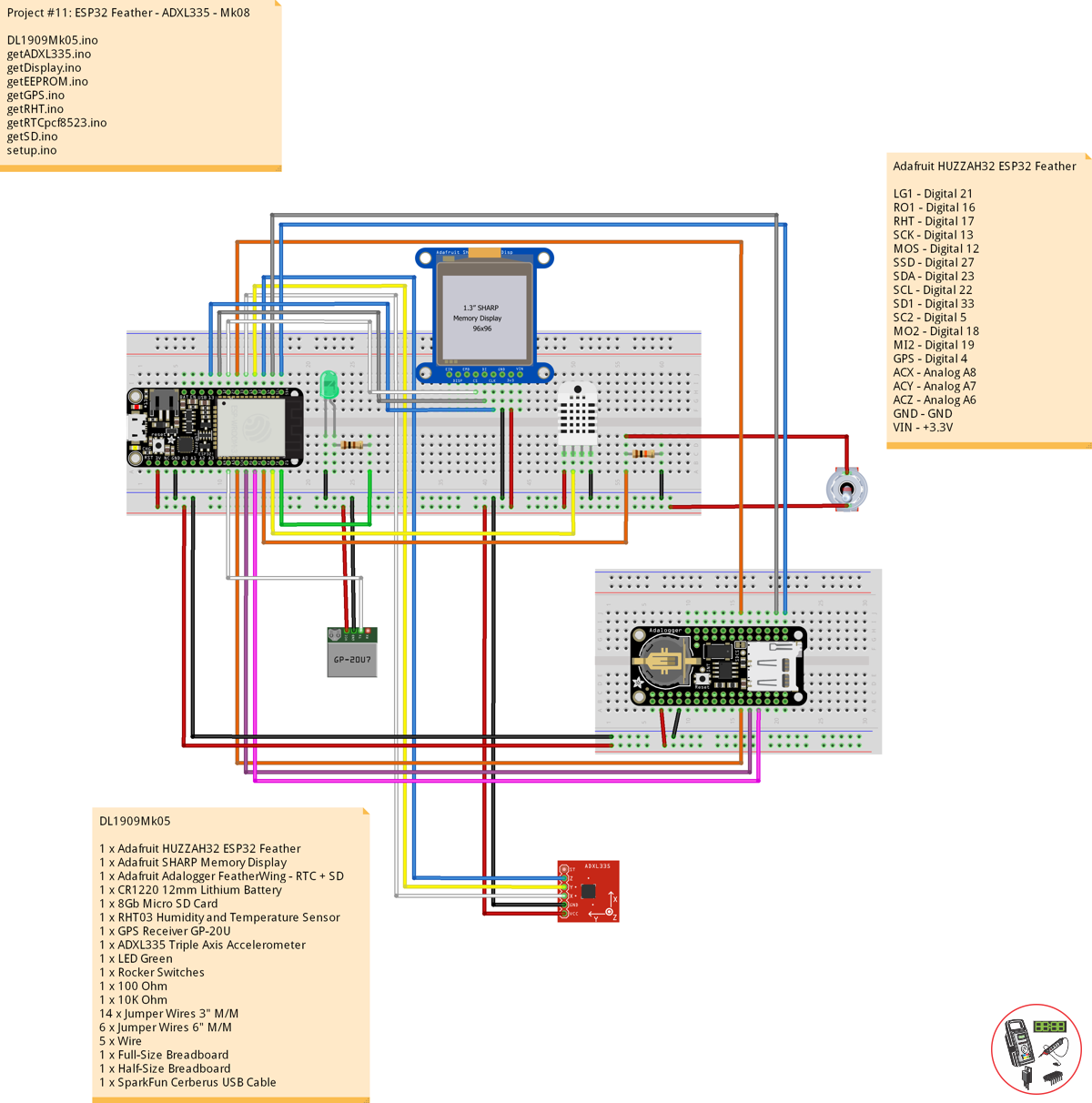







_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.