



- INTRODUCTION: -
In this project we will be involved in the setup of a Flame Detection sensor on the Pluto 1.2 drone and learn how to use it to avoid the UAV from being burnt. This is another project similar to the above project but it is to make the students well versed with the integration of a sensor on a Pluto drone.
- OBJECTIVES: -
To learn sensor integration and use its sensor values for actuation.
- PROBLEM STATEMENT: -
We will use the values from the Flame Detection sensor to save the Pluto 1.2 drone from being burnt by pitching it backwards; away from the fire zone.
- APPROACHING THE PROBLEM: -
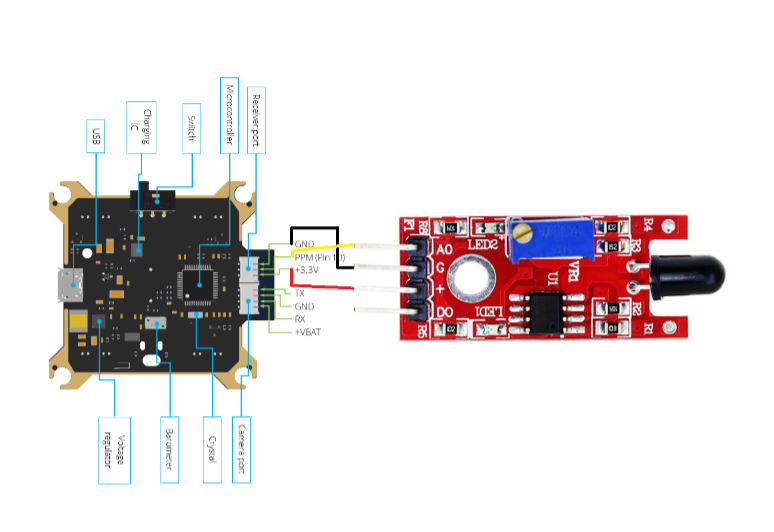
Initially we need to understand how the Flame Detection sensor works; what values does it provide while it is sensing a flame, fire or high heat and when it’s not. And later how to use those values to pitch the drone backwards. So firstly, you need to know the hardware connections for which you need to know about the GPIO 10 pin.
RIGHT PICTURE: -
LEFT WIRE: POWER
MIDDLE WIRE: PPM
RIGHT MOST: GROUND
- GPIO PINS: -
GPIO (General Purpose Input/Output) pins are a fundamental feature of many microcontrollers; these pins serve as flexible interfaces that can be configured to either input or output mode, allowing the microcontroller to interact with external devices and circuits. Similarly, the pin 10 is used as an interface between the Flame Detection sensor and Pluto 1.2 flight controller, where the sensor values are transferred through.
- MOUNTING AND CONNECTIONS: -
PRIMUS (BOTTOM) AND FIRE DETECTION SENSOR (TOP)
BOTTOM VIEW
Like shown above, you need to properly connect the ground, ppm and power pins of Pluto 1.2 to the Flame Detection sensor pins respectively.
( Zoom to avoid misunderstanding )
- SOLUTION: -
- EXPLANATION OF THE SOLUTION: -
To start with we need to understand what values would the Flame Detection pass on in the console by printing it and observing what values does it give when the flame is brought near it (you can use a lighter or a matchstick)
After understanding that, the flame sensor gives a value ‘1’ when the flame is brought in its vicinity, we can feed this directly into the ‘if’ condition and move further with what we want the drone to do after sensing.
Later, we set a strong pitch of 1000 which makes Pluto move backwards immediately after sensing the fire around it.
Moving forward, like we did in the IR sensor project, we set the pitch back to the commands given by the controller used by the pilot wherein after knowing there is no fire threat around the drone, it can again be swiftly be controlled by the pilot.







{kind=link}
Comments
Please log in or sign up to comment.