//Modified by ProfessorHulk//
//ARDUINO LINE FOLLOWER //
// YOU HAVE TO INSTALL THE AFMOTOR LIBRARY BEFORE UPLOAD THE CODE//
// GO TO SKETCH >> INCLUDE LIBRARY >> ADD .ZIP LIBRARY >> SELECT AF MOTOR ZIP FILE //
//including the libraries
#include <AFMotor.h>
//defining pins and variables
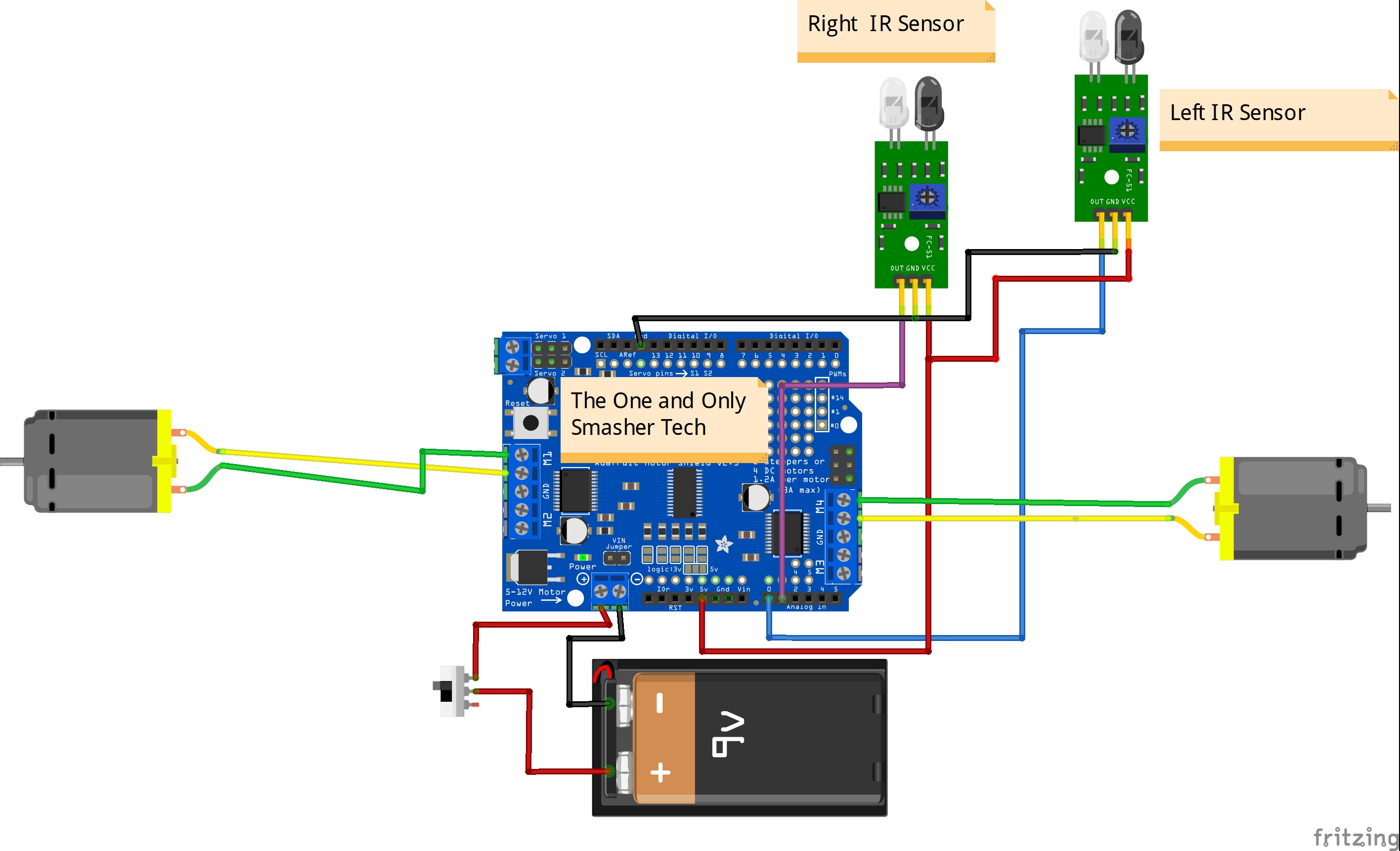
#define left A0
#define right A1
//defining motors
AF_DCMotor M1(1);
AF_DCMotor M4(4);
void setup() {
//declaring pin types
pinMode(left,INPUT);
pinMode(right,INPUT);
//begin serial communication
Serial.begin(9600);
}
void loop(){
//printing values of the sensors to the serial monitor
Serial.println(digitalRead(left));
Serial.println(digitalRead(right));
//line detected by both
if(digitalRead(left)==0 && digitalRead(right)==0){
//Forward
M1.run(FORWARD);
M1.setSpeed(150);
M4.run(FORWARD);
M4.setSpeed(150);
}
//line detected by left sensor
else if(digitalRead(left)==0 && !analogRead(right)==0){
//turn left
M1.run(FORWARD);
M1.setSpeed(200);
M4.run(BACKWARD);
M4.setSpeed(200);
}
//line detected by right sensor
else if(!digitalRead(left)==0 && digitalRead(right)==0){
//turn right
M1.run(BACKWARD);
M1.setSpeed(200);
M4.run(FORWARD);
M4.setSpeed(200);
}
//line detected by none
else if(!digitalRead(left)==0 && !digitalRead(right)==0){
//stop
M1.run(RELEASE);
M1.setSpeed(0);
M4.run(RELEASE);
M4.setSpeed(0);
}
}







{kind=link}
Comments
Please log in or sign up to comment.