


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
Usually people or animals are lost in the mountains. They are usually children or adults who are unaware of the environment while on vacation. Once the alarm has been given, the search teams use many resources (helicopters, search cams, etc.) to locate these people or lost animals.
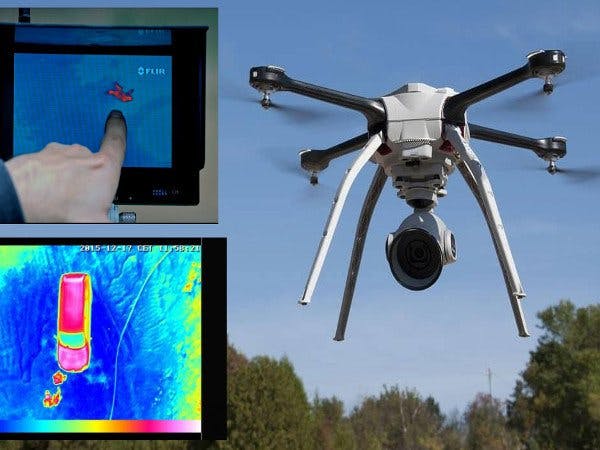
The project consists of an autonomous drone equipped with GPS capable of traveling through mountainous areas, GSM for communication with the central system, and a thermal camera capable that can map and locate people or animals, both day and night.
Once the drone has detected a target, the system will send a GSM alert with the location of the person or animal located together with a thermal image.
In addition, when the battery level is insufficient, the drone will automatically return to the control base (thanks to GPS) for recharging or changing the battery.
The drone will have several search modes:
- Spiral mode: The drone will start from a point and will go away in a spiral to expand the search area.
- Mapping mode: The drone will start from a point and linearly map a square area (configurable distance).
- Road mode: The drone will start from a point and follow the path drawn on a map from the central system.
The whole system will be controlled by a Rapsberry Pi, using the OpenCV library to take and process the images of the thermal camera (range of about 100m) and next to a neural network implemented with the uTensorFlow framework to discriminate between the different elements detected by the thermal camera.
The drone will be able to change elevation according to the relief to be always less than 100 meters high to be able to perform the recognition of the objectives with the thermal camera.







Comments
Please log in or sign up to comment.