



Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 | ||||
| × | 2 | ||||
 |
| × | 2 | |||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
| ||||||
| ||||||
Hand tools and fabrication machines | ||||||
| ||||||
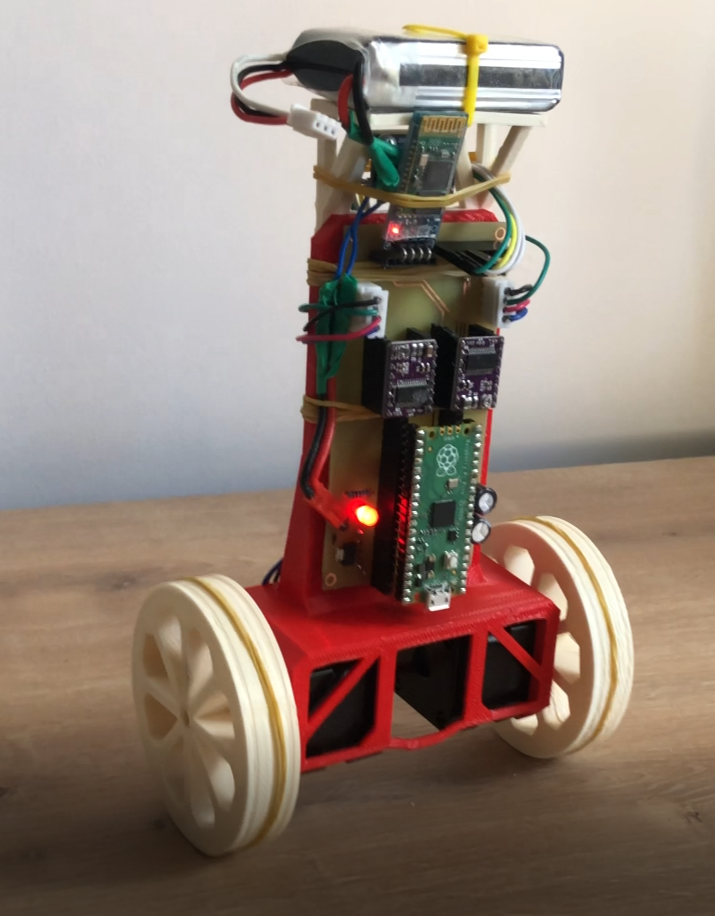
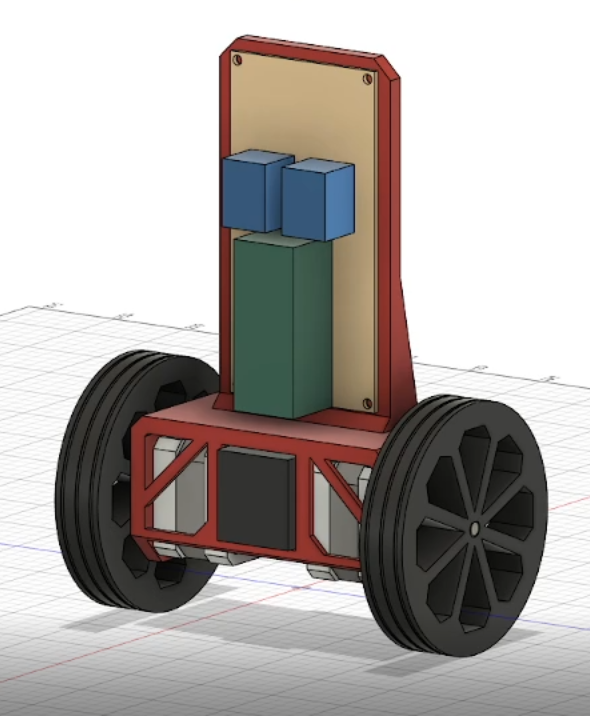
LOTP (stands for “Line On The Paper”) Two-Wheeled Self-Balancing Robot Project is an open source –DIY- project. It can maintain its own balance and can be controlled remotely via wireless connection.
Its features are:
. Fusion 360 designed
. Bluetooth control is available
. Raspberry Pi Pico used as a micro controller
. Software is written in Python
. Stepper Motors are used to perform movement
. PID Controller implemented
. Self - Balancing
. Open Source
. DIY Project
All project files & documents are shared at the GitHub link given below.
https://github.com/SMDHuman/BalanceWheel
The contents of the shares are as follows
1. 3D Design Files (Robot Step.stl files)
2. Circuit Diagrams (Electronics.json.pdf gerber files)
3. Software
4. Pictures
5. List of Materials
# Copyright (c) 2018-2020 Mika Tuupola
#
# Permission is hereby granted, free of charge, to any person obtaining a copy
# of this software and associated documentation files (the "Software"), to
# deal in the Software without restriction, including without limitation the
# rights to use, copy, modify, merge, publish, distribute, sublicense, and/or
# sell copied of the Software, and to permit persons to whom the Software is
# furnished to do so, subject to the following conditions:
#
# The above copyright notice and this permission notice shall be included in
# all copies or substantial portions of the Software.
#
# THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
# IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
# FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
# AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
# LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
# OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
# SOFTWARE.
# https://github.com/tuupola/micropython-mpu9250
# https://www.akm.com/akm/en/file/datasheet/AK8963C.pdf
"""
MicroPython I2C driver for AK8963 magnetometer
"""
__version__ = "0.3.0"
# pylint: disable=import-error
import ustruct
import utime
from machine import I2C, Pin
from micropython import const
# pylint: enable=import-error
_WIA = const(0x00)
_HXL = const(0x03)
_HXH = const(0x04)
_HYL = const(0x05)
_HYH = const(0x06)
_HZL = const(0x07)
_HZH = const(0x08)
_ST2 = const(0x09)
_CNTL1 = const(0x0a)
_ASAX = const(0x10)
_ASAY = const(0x11)
_ASAZ = const(0x12)
_MODE_POWER_DOWN = 0b00000000
MODE_SINGLE_MEASURE = 0b00000001
MODE_CONTINOUS_MEASURE_1 = 0b00000010 # 8Hz
MODE_CONTINOUS_MEASURE_2 = 0b00000110 # 100Hz
MODE_EXTERNAL_TRIGGER_MEASURE = 0b00000100
_MODE_SELF_TEST = 0b00001000
_MODE_FUSE_ROM_ACCESS = 0b00001111
OUTPUT_14_BIT = 0b00000000
OUTPUT_16_BIT = 0b00010000
_SO_14BIT = 0.6 # T per digit when 14bit mode
_SO_16BIT = 0.15 # T per digit when 16bit mode
class AK8963:
"""Class which provides interface to AK8963 magnetometer."""
def __init__(
self, i2c, address=0x0c,
mode=MODE_CONTINOUS_MEASURE_1, output=OUTPUT_16_BIT,
offset=(0, 0, 0), scale=(1, 1, 1)
):
self.i2c = i2c
self.address = address
self._offset = offset
self._scale = scale
if 0x48 != self.whoami:
raise RuntimeError("AK8963 not found in I2C bus.")
# Sensitivity adjustement values
self._register_char(_CNTL1, _MODE_FUSE_ROM_ACCESS)
asax = self._register_char(_ASAX)
asay = self._register_char(_ASAY)
asaz = self._register_char(_ASAZ)
self._register_char(_CNTL1, _MODE_POWER_DOWN)
# Should wait atleast 100us before next mode
self._adjustement = (
(0.5 * (asax - 128)) / 128 + 1,
(0.5 * (asay - 128)) / 128 + 1,
(0.5 * (asaz - 128)) / 128 + 1
)
# Power on
self._register_char(_CNTL1, (mode | output))
if output is OUTPUT_16_BIT:
self._so = _SO_16BIT
else:
self._so = _SO_14BIT
@property
def magnetic(self):
"""
X, Y, Z axis micro-Tesla (uT) as floats.
"""
xyz = list(self._register_three_shorts(_HXL))
self._register_char(_ST2) # Enable updating readings again
# Apply factory axial sensitivy adjustements
xyz[0] *= self._adjustement[0]
xyz[1] *= self._adjustement[1]
xyz[2] *= self._adjustement[2]
# Apply output scale determined in constructor
so = self._so
xyz[0] *= so
xyz[1] *= so
xyz[2] *= so
# Apply hard iron ie. offset bias from calibration
xyz[0] -= self._offset[0]
xyz[1] -= self._offset[1]
xyz[2] -= self._offset[2]
# Apply soft iron ie. scale bias from calibration
xyz[0] *= self._scale[0]
xyz[1] *= self._scale[1]
xyz[2] *= self._scale[2]
return tuple(xyz)
@property
def adjustement(self):
return self._adjustement
@property
def whoami(self):
""" Value of the whoami register. """
return self._register_char(_WIA)
def calibrate(self, count=256, delay=200):
self._offset = (0, 0, 0)
self._scale = (1, 1, 1)
reading = self.magnetic
minx = maxx = reading[0]
miny = maxy = reading[1]
minz = maxz = reading[2]
while count:
utime.sleep_ms(delay)
reading = self.magnetic
minx = min(minx, reading[0])
maxx = max(maxx, reading[0])
miny = min(miny, reading[1])
maxy = max(maxy, reading[1])
minz = min(minz, reading[2])
maxz = max(maxz, reading[2])
count -= 1
# Hard iron correction
offset_x = (maxx + minx) / 2
offset_y = (maxy + miny) / 2
offset_z = (maxz + minz) / 2
self._offset = (offset_x, offset_y, offset_z)
# Soft iron correction
avg_delta_x = (maxx - minx) / 2
avg_delta_y = (maxy - miny) / 2
avg_delta_z = (maxz - minz) / 2
avg_delta = (avg_delta_x + avg_delta_y + avg_delta_z) / 3
scale_x = avg_delta / avg_delta_x
scale_y = avg_delta / avg_delta_y
scale_z = avg_delta / avg_delta_z
self._scale = (scale_x, scale_y, scale_z)
return self._offset, self._scale
def _register_short(self, register, value=None, buf=bytearray(2)):
if value is None:
self.i2c.readfrom_mem_into(self.address, register, buf)
return ustruct.unpack("<h", buf)[0]
ustruct.pack_into("<h", buf, 0, value)
return self.i2c.writeto_mem(self.address, register, buf)
def _register_three_shorts(self, register, buf=bytearray(6)):
self.i2c.readfrom_mem_into(self.address, register, buf)
return ustruct.unpack("<hhh", buf)
def _register_char(self, register, value=None, buf=bytearray(1)):
if value is None:
self.i2c.readfrom_mem_into(self.address, register, buf)
return buf[0]
ustruct.pack_into("<b", buf, 0, value)
return self.i2c.writeto_mem(self.address, register, buf)
def __enter__(self):
return self
def __exit__(self, exception_type, exception_value, traceback):
pass
from machine import Pin, PWM, I2C, UART
from utime import sleep, ticks_ms
from mpu9250 import MPU9250
from math import atan2, degrees, pi
from stepper import Stepper
class PID():
def __init__(self, p, i, d, target, minOut, maxOut):
self.targetBias = 0
self.target = target
self.pK = p
self.iK = i
self.dK = d
self.error = 0
self.sumError = 0
self.lastError = 0
self.minOut = minOut
self.maxOut = maxOut
def update(self, now):
self.error = (self.target + self.targetBias) - now
self.sumError += self.error
out = (self.error * self.pK) + (self.sumError * self.iK) + ((self.error - self.lastError) * self.dK)
self.lastError = self.error
out = self.minOut if out < self.minOut else out
out = self.maxOut if out > self.maxOut else out
return(out)
accK =.03
lastTime = ticks_ms()
def readAngle(angles):
global lastTime
now = ticks_ms()
gyro = mpu.gyro
acc = mpu.acceleration
#angles[0] += (gyro[0] - gyroBias[0])*100000 /16384
angles[1] -= (gyro[1] - gyroBias[1])*pi
angles[2] += (gyro[2] - gyroBias[2])*pi
#angles[0] += (degrees(atan2(acc[1], acc[2])) - angles[0]) * accK
angles[1] += (degrees(atan2(acc[0], acc[2])) - angles[1]) * accK
angles[2] += (degrees(atan2(acc[0], acc[1])) - angles[2]) * accK
angles[0] = round(angles[0], 2)
angles[1] = round(angles[1], 2)
angles[2] = round(angles[2], 2)
lastTime = now
return(angles)
def sendCMD(cmd, timeout=2000):
print("CMD: " + cmd)
bl.write(cmd)
waitResp(timeout)
def waitResp(timeout=2000):
prvMills = ticks_ms()
resp = b""
while (ticks_ms()-prvMills)<timeout:
if bl.any():
resp = b"".join([resp, bl.read(1)])
print(resp)
led = Pin(2, Pin.OUT)
led.value(0)
bl = UART(1, baudrate=9600, tx=Pin(4), rx=Pin(5))
gyroBias = [-0.0235664, 0.003460463, 0.01118344]
i2c = I2C(id = 1, scl = Pin(15), sda = Pin(14))
mpu = MPU9250(i2c)
motorR = Stepper(18, 17, 21, 20, 19)
motorL = Stepper(10, 9, 13, 12, 11)
motorR.start()
motorL.start()
motorR.setMode(5)
motorL.setMode(5)
#sendCMD("AT\r\n")
#sendCMD("AT+VERSION\r\n")
#sendCMD("AT+NAMEHC-06")
directions = {'S' : [0, 0], 'F' : [1, 0], 'B' : [-1, 0],
'R' : [0, 1], 'L' : [0, -1], 'I' : [1, 1],
'G' : [1, -1], 'J' : [-1, 1], 'H' : [-1, -1]}
numbers = {"0":0, "1":1, "2":2, "3":3, "4":4, "5":5, "6":6, "7":7, "8":8, "9":9, "q":10}
biasAngle = 0
targetAngle = 89
tagretRPM = 0
speed = 40
speedBias = 0
gyroPID = PID(2, 0.3, 0, targetAngle, -100, 100)
rpmPID = PID(.1, 0.0001, .00, tagretRPM, -12, 12)
motorMax = 10
motorMin = -10
moveDir = [0, 0]
angles = [0, 90, 90]
for i in range(20):
angles = readAngle(angles)
errorSumA = 0
errorOldA = 0
errorSumR = 0
errorOldR = 0
filteredAngles = angles.copy()
f = 0.5
oldTick = ticks_ms()
sliderData = 0
while(1):
angles = readAngle(angles)
nowTick = ticks_ms()
if(nowTick - oldTick > 20):
#print(rpmPID.target)
oldTick = nowTick
filteredAngles[0] = (angles[0] * (1 - f)) + filteredAngles[0] * f
filteredAngles[1] = (angles[1] * (1 - f)) + filteredAngles[1] * f
filteredAngles[2] = (angles[2] * (1 - f)) + filteredAngles[2] * f
#print('a:', angles[1], 'f:', filteredAngles[1], 't:', targetAngle, 'e:', filteredAngles[1] - targetAngle)
if(bl.any()):
data = bl.read()
#print(data)
for d in str(data)[2:-1]:
moveDir[1] = 0
if(d == "S"):
rpmPID.target = 0
moveDir[1] = 0
if(d == "F" or d == "I" or d == "G"):
rpmPID.target = speed
if(d == "B" or d == "J" or d == "H"):
rpmPID.target = -speed
if(d == "L" or d == "G" or d == "H"):
moveDir[1] = -12
if(d == "R" or d == "I" or d == "J"):
moveDir[1] = 12
if(d in numbers):
sliderData = numbers[d]
if(40 > abs(filteredAngles[1] - targetAngle) > 0 and 1):
gyroPID.targetBias = rpmPID.update(moveDir[0]) + speedBias
moveDir[0] = -gyroPID.update(filteredAngles[1])
#print(moveDir[0])
#print(moveDir)
motorL.setRPM(moveDir[0] + moveDir[1])
motorR.setRPM(moveDir[0] - moveDir[1])
else:
motorR.stop()
motorL.stop()
sleep(0.01)
from mpu9250 import MPU9250
from machine import Pin, I2C
i2c = I2C(id = 1, scl = Pin(15), sda = Pin(14))
mpu = MPU9250(i2c)
n = 300
rawData = [mpu.gyro for i in range(n)]
calData = [sum([rawData[i][0] for i in range(n)]) / n,
sum([rawData[i][1] for i in range(n)]) / n,
sum([rawData[i][2] for i in range(n)]) / n]
print(calData)
# Copyright (c) 2018-2020 Mika Tuupola
#
# Permission is hereby granted, free of charge, to any person obtaining a copy
# of this software and associated documentation files (the "Software"), to
# deal in the Software without restriction, including without limitation the
# rights to use, copy, modify, merge, publish, distribute, sublicense, and/or
# sell copied of the Software, and to permit persons to whom the Software is
# furnished to do so, subject to the following conditions:
#
# The above copyright notice and this permission notice shall be included in
# all copies or substantial portions of the Software.
#
# THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
# IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
# FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
# AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
# LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
# OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
# SOFTWARE.
# https://github.com/tuupola/micropython-mpu9250
"""
MicroPython I2C driver for MPU6500 6-axis motion tracking device
"""
__version__ = "0.3.0"
# pylint: disable=import-error
import ustruct
import utime
from machine import I2C, Pin
from micropython import const
# pylint: enable=import-error
_GYRO_CONFIG = const(0x1b)
_ACCEL_CONFIG = const(0x1c)
_ACCEL_CONFIG2 = const(0x1d)
_ACCEL_XOUT_H = const(0x3b)
_ACCEL_XOUT_L = const(0x3c)
_ACCEL_YOUT_H = const(0x3d)
_ACCEL_YOUT_L = const(0x3e)
_ACCEL_ZOUT_H = const(0x3f)
_ACCEL_ZOUT_L= const(0x40)
_TEMP_OUT_H = const(0x41)
_TEMP_OUT_L = const(0x42)
_GYRO_XOUT_H = const(0x43)
_GYRO_XOUT_L = const(0x44)
_GYRO_YOUT_H = const(0x45)
_GYRO_YOUT_L = const(0x46)
_GYRO_ZOUT_H = const(0x47)
_GYRO_ZOUT_L = const(0x48)
_WHO_AM_I = const(0x75)
#_ACCEL_FS_MASK = const(0b00011000)
ACCEL_FS_SEL_2G = const(0b00000000)
ACCEL_FS_SEL_4G = const(0b00001000)
ACCEL_FS_SEL_8G = const(0b00010000)
ACCEL_FS_SEL_16G = const(0b00011000)
_ACCEL_SO_2G = 16384 # 1 / 16384 ie. 0.061 mg / digit
_ACCEL_SO_4G = 8192 # 1 / 8192 ie. 0.122 mg / digit
_ACCEL_SO_8G = 4096 # 1 / 4096 ie. 0.244 mg / digit
_ACCEL_SO_16G = 2048 # 1 / 2048 ie. 0.488 mg / digit
#_GYRO_FS_MASK = const(0b00011000)
GYRO_FS_SEL_250DPS = const(0b00000000)
GYRO_FS_SEL_500DPS = const(0b00001000)
GYRO_FS_SEL_1000DPS = const(0b00010000)
GYRO_FS_SEL_2000DPS = const(0b00011000)
_GYRO_SO_250DPS = 131
_GYRO_SO_500DPS = 62.5
_GYRO_SO_1000DPS = 32.8
_GYRO_SO_2000DPS = 16.4
_TEMP_SO = 333.87
_TEMP_OFFSET = 21
SF_G = 1
SF_M_S2 = 9.80665 # 1 g = 9.80665 m/s2 ie. standard gravity
SF_DEG_S = 1
SF_RAD_S = 0.017453292519943 # 1 deg/s is 0.017453292519943 rad/s
class MPU6500:
"""Class which provides interface to MPU6500 6-axis motion tracking device."""
def __init__(
self, i2c, address=0x68,
accel_fs=ACCEL_FS_SEL_2G, gyro_fs=GYRO_FS_SEL_250DPS,
accel_sf=SF_M_S2, gyro_sf=SF_RAD_S,
gyro_offset=(0, 0, 0)
):
self.i2c = i2c
self.address = address
# 0x70 = standalone MPU6500, 0x71 = MPU6250 SIP
if self.whoami not in [0x71, 0x70]:
raise RuntimeError("MPU6500 not found in I2C bus.")
self._accel_so = self._accel_fs(accel_fs)
self._gyro_so = self._gyro_fs(gyro_fs)
self._accel_sf = accel_sf
self._gyro_sf = gyro_sf
self._gyro_offset = gyro_offset
@property
def acceleration(self):
"""
Acceleration measured by the sensor. By default will return a
3-tuple of X, Y, Z axis acceleration values in m/s^2 as floats. Will
return values in g if constructor was provided `accel_sf=SF_M_S2`
parameter.
"""
so = self._accel_so
sf = self._accel_sf
xyz = self._register_three_shorts(_ACCEL_XOUT_H)
return tuple([value / so * sf for value in xyz])
@property
def gyro(self):
"""
X, Y, Z radians per second as floats.
"""
so = self._gyro_so
sf = self._gyro_sf
ox, oy, oz = self._gyro_offset
xyz = self._register_three_shorts(_GYRO_XOUT_H)
xyz = [value / so * sf for value in xyz]
xyz[0] -= ox
xyz[1] -= oy
xyz[2] -= oz
return tuple(xyz)
@property
def temperature(self):
"""
Die temperature in celcius as a float.
"""
temp = self._register_short(_TEMP_OUT_H)
return ((temp - _TEMP_OFFSET) / _TEMP_SO) + _TEMP_OFFSET
@property
def whoami(self):
""" Value of the whoami register. """
return self._register_char(_WHO_AM_I)
def calibrate(self, count=256, delay=0):
ox, oy, oz = (0.0, 0.0, 0.0)
self._gyro_offset = (0.0, 0.0, 0.0)
n = float(count)
while count:
utime.sleep_ms(delay)
gx, gy, gz = self.gyro
ox += gx
oy += gy
oz += gz
count -= 1
self._gyro_offset = (ox / n, oy / n, oz / n)
return self._gyro_offset
def _register_short(self, register, value=None, buf=bytearray(2)):
if value is None:
self.i2c.readfrom_mem_into(self.address, register, buf)
return ustruct.unpack(">h", buf)[0]
ustruct.pack_into(">h", buf, 0, value)
return self.i2c.writeto_mem(self.address, register, buf)
def _register_three_shorts(self, register, buf=bytearray(6)):
self.i2c.readfrom_mem_into(self.address, register, buf)
return ustruct.unpack(">hhh", buf)
def _register_char(self, register, value=None, buf=bytearray(1)):
if value is None:
self.i2c.readfrom_mem_into(self.address, register, buf)
return buf[0]
ustruct.pack_into("<b", buf, 0, value)
return self.i2c.writeto_mem(self.address, register, buf)
def _accel_fs(self, value):
self._register_char(_ACCEL_CONFIG, value)
# Return the sensitivity divider
if ACCEL_FS_SEL_2G == value:
return _ACCEL_SO_2G
elif ACCEL_FS_SEL_4G == value:
return _ACCEL_SO_4G
elif ACCEL_FS_SEL_8G == value:
return _ACCEL_SO_8G
elif ACCEL_FS_SEL_16G == value:
return _ACCEL_SO_16G
def _gyro_fs(self, value):
self._register_char(_GYRO_CONFIG, value)
# Return the sensitivity divider
if GYRO_FS_SEL_250DPS == value:
return _GYRO_SO_250DPS
elif GYRO_FS_SEL_500DPS == value:
return _GYRO_SO_500DPS
elif GYRO_FS_SEL_1000DPS == value:
return _GYRO_SO_1000DPS
elif GYRO_FS_SEL_2000DPS == value:
return _GYRO_SO_2000DPS
def __enter__(self):
return self
def __exit__(self, exception_type, exception_value, traceback):
pass
# Copyright (c) 2018-2020 Mika Tuupola
#
# Permission is hereby granted, free of charge, to any person obtaining a copy
# of this software and associated documentation files (the "Software"), to
# deal in the Software without restriction, including without limitation the
# rights to use, copy, modify, merge, publish, distribute, sublicense, and/or
# sell copied of the Software, and to permit persons to whom the Software is
# furnished to do so, subject to the following conditions:
#
# The above copyright notice and this permission notice shall be included in
# all copies or substantial portions of the Software.
#
# THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
# IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
# FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
# AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
# LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
# OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
# SOFTWARE.
# https://github.com/tuupola/micropython-mpu9250
"""
MicroPython I2C driver for MPU9250 9-axis motion tracking device
"""
# pylint: disable=import-error
from micropython import const
from mpu6500 import MPU6500
from ak8963 import AK8963
# pylint: enable=import-error
__version__ = "0.3.0"
# Used for enabling and disabling the I2C bypass access
_INT_PIN_CFG = const(0x37)
_I2C_BYPASS_MASK = const(0b00000010)
_I2C_BYPASS_EN = const(0b00000010)
_I2C_BYPASS_DIS = const(0b00000000)
class MPU9250:
"""Class which provides interface to MPU9250 9-axis motion tracking device."""
def __init__(self, i2c, mpu6500 = None, ak8963 = None):
if mpu6500 is None:
self.mpu6500 = MPU6500(i2c)
else:
self.mpu6500 = mpu6500
# Enable I2C bypass to access AK8963 directly.
char = self.mpu6500._register_char(_INT_PIN_CFG)
char &= ~_I2C_BYPASS_MASK # clear I2C bits
char |= _I2C_BYPASS_EN
self.mpu6500._register_char(_INT_PIN_CFG, char)
if ak8963 is None:
self.ak8963 = AK8963(i2c)
else:
self.ak8963 = ak8963
@property
def acceleration(self):
"""
Acceleration measured by the sensor. By default will return a
3-tuple of X, Y, Z axis values in m/s^2 as floats. To get values in g
pass `accel_fs=SF_G` parameter to the MPU6500 constructor.
"""
return self.mpu6500.acceleration
@property
def gyro(self):
"""
Gyro measured by the sensor. By default will return a 3-tuple of
X, Y, Z axis values in rad/s as floats. To get values in deg/s pass
`gyro_sf=SF_DEG_S` parameter to the MPU6500 constructor.
"""
return self.mpu6500.gyro
@property
def temperature(self):
"""
Die temperature in celcius as a float.
"""
return self.mpu6500.temperature
@property
def magnetic(self):
"""
X, Y, Z axis micro-Tesla (uT) as floats.
"""
return self.ak8963.magnetic
@property
def whoami(self):
return self.mpu6500.whoami
def __enter__(self):
return self
def __exit__(self, exception_type, exception_value, traceback):
pass
from machine import Pin, PWM
class Stepper():
def __init__(self, stepP, dirP, m1 = None, m2 = None, m3 = None, enP = None):
self.modeInitState = m1 != None
self.enInitState = enP != None
self.stepP = PWM(Pin(stepP))
self.dirP = Pin(dirP, Pin.OUT)
if(self.modeInitState): self.modePs = [Pin(m3, Pin.OUT), Pin(m2, Pin.OUT), Pin(m1, Pin.OUT)]
if(self.enInitState): self.enP = Pin(enP, Pin.OUT)
self.stepP.duty_u16(0)
self.dirP.value(0)
if(self.enInitState): self.enP.value(0)
if(self.modeInitState):
for mode in self.modePs:
mode.value(0)
self.currentMode = 0
def lock(self): self.enP.value(0)
def unlock(self): self.enP.value(1)
def start(self): self.stepP.duty_u16(2**15)
def stop(self): self.stepP.duty_u16(0)
def setStep(self, step):
self.dirP.value(step > 0)
step = abs(int(step))
if(step > 15):
self.stepP.freq(step)
self.start()
def setRPM(self, rpm):
self.setStep(rpm * 200)
def setMode(self, mode):
self.currentMode = mode
mode = bin(min(max(mode, 0), 7))[2:]
mode = '0' * (3 - len(mode)) + mode
for m, p in zip(mode, self.modePs):
p.value(int(m))






{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.