/*
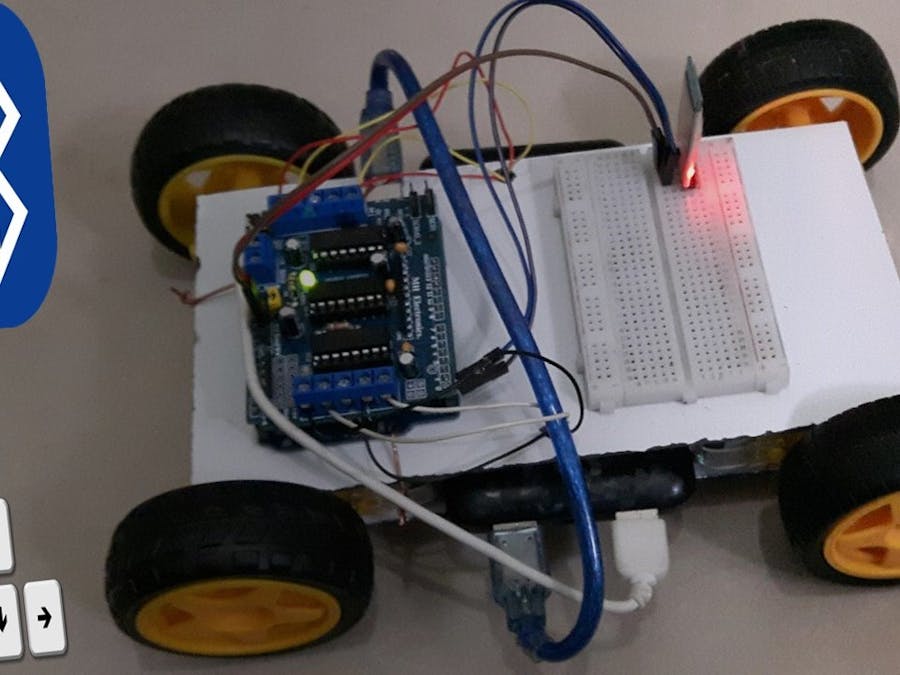
Bluetooth car
written by sanuka
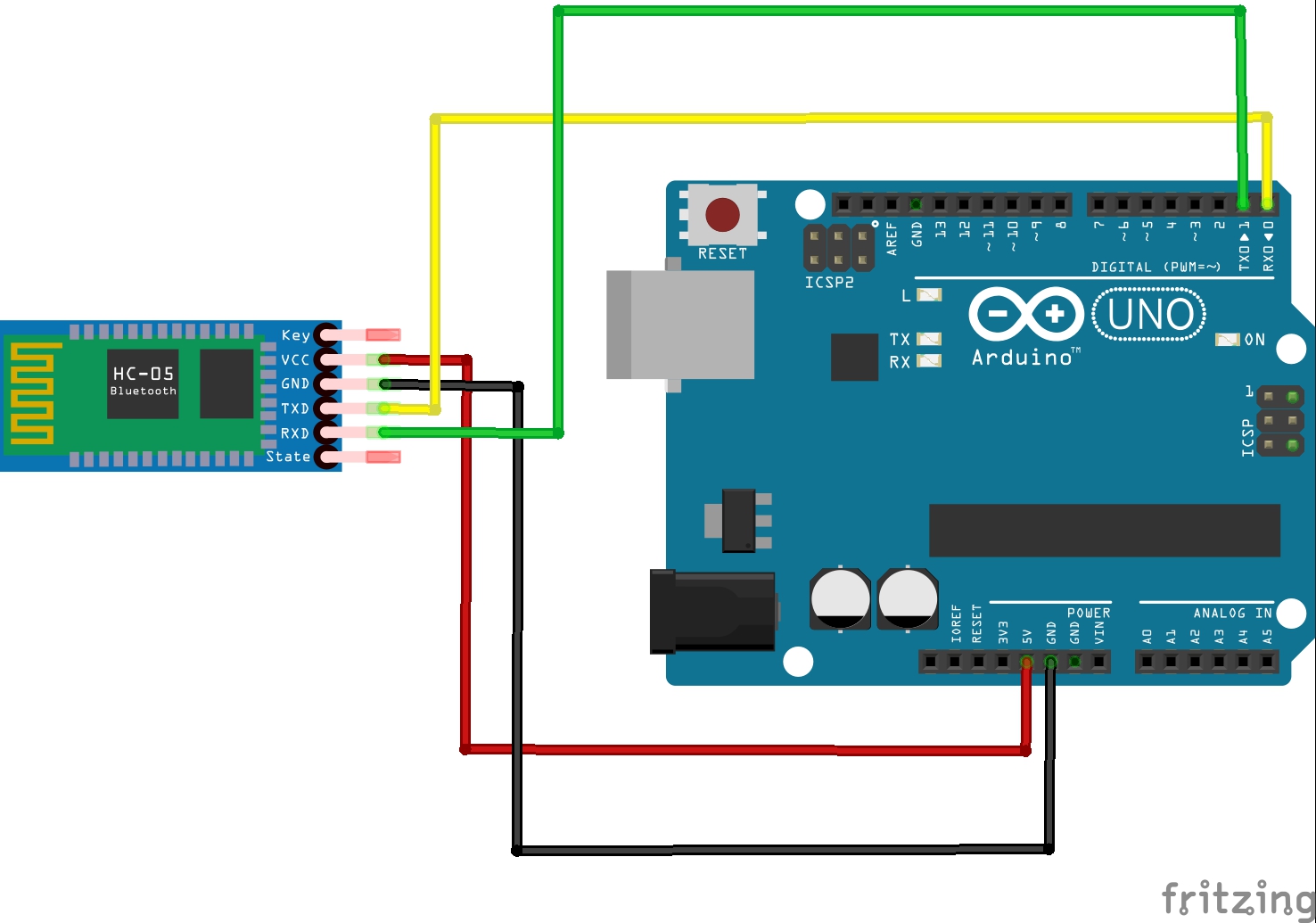
rx------->D1
tx------->D0
vcc------>+5v
GND------>GND
*/
#include <AFMotor.h> //include the library
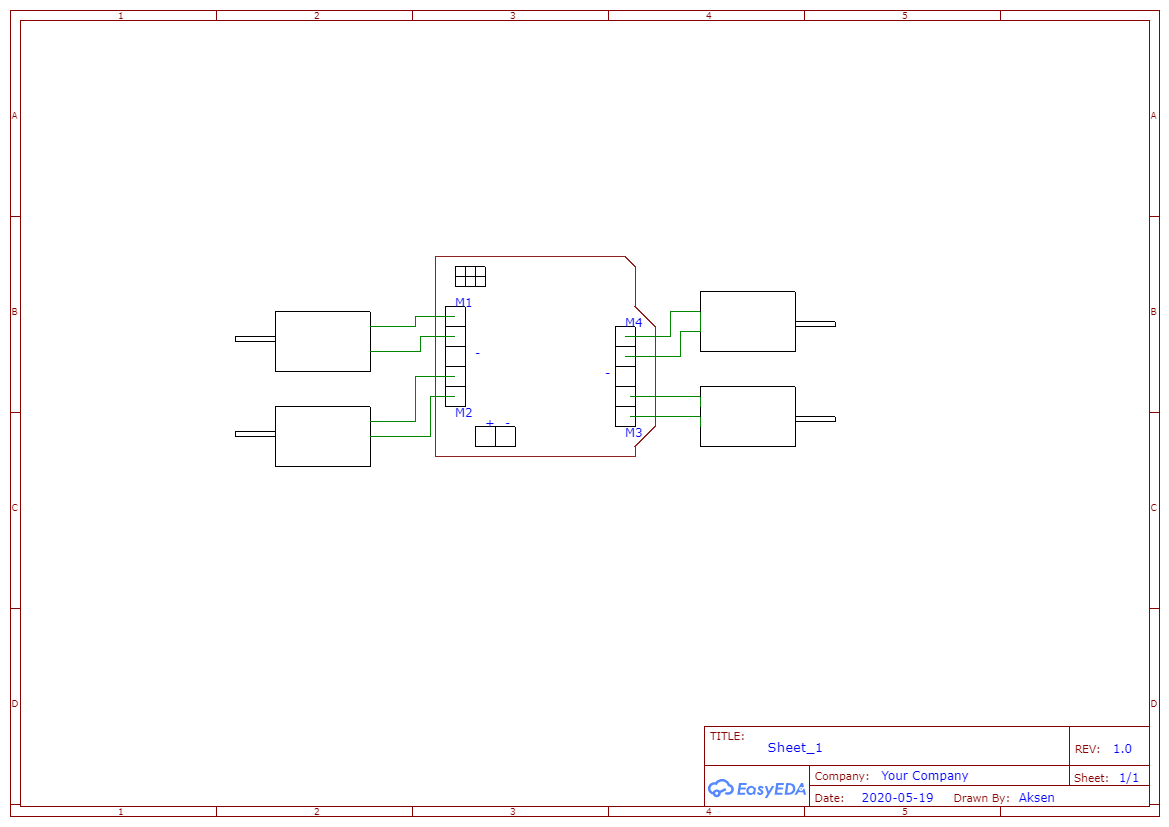
AF_DCMotor motor1(1); // naming the motors
AF_DCMotor motor2(2);
AF_DCMotor motor3(3);
AF_DCMotor motor4(4);
char val;
void setup() {
motor1.setSpeed(255); //give a speed to the motors
motor2.setSpeed(255);
motor3.setSpeed(255);
motor4.setSpeed(255);
pinMode(13, OUTPUT);
Serial.begin(9600);
}
void loop() {
if (Serial.available()) {
val = Serial.read();
Serial.println(val);
}
if (val == 'F') {
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(FORWARD);//go forward
motor4.run(FORWARD);
}
else if (val == 'B') {
motor1.run(BACKWARD);
motor2.run(BACKWARD);
motor3.run(BACKWARD);//go backward
motor4.run(BACKWARD);
}
else if (val == 'R') {
motor1.run(FORWARD);
motor2.run(FORWARD);//go right
motor3.run(BACKWARD);
motor4.run(BACKWARD);
}
else if (val == 'L') {
motor1.run(BACKWARD);
motor2.run(BACKWARD);
motor3.run(FORWARD);//go left
motor4.run(FORWARD);
}
else if (val == 'S') {
motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.run(RELEASE);//stop
motor4.run(RELEASE);
}
else if (val == '5') {
motor1.setSpeed(150);
motor2.setSpeed(150);//change speed
motor3.setSpeed(150);
motor4.setSpeed(150);
}
else if (val == 'q') {
motor1.setSpeed(255);
motor2.setSpeed(255);
motor3.setSpeed(255);
motor4.setSpeed(255);
}
else if (val == 'V') {
digitalWrite(13, HIGH);
}
else if (val == 'v') {
digitalWrite(13, LOW);
}
delay(100);
}




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)











{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.