


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
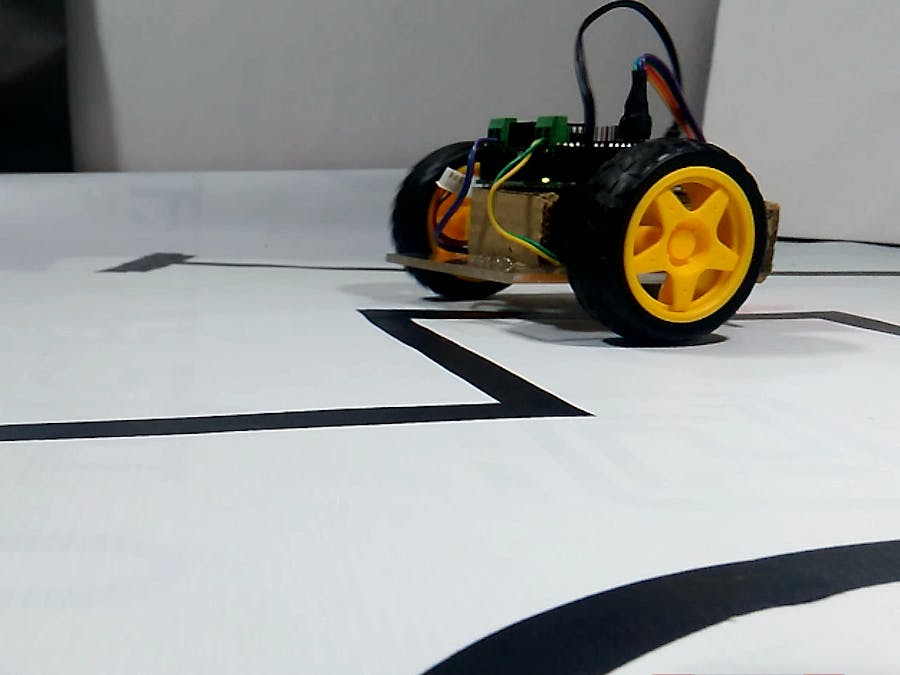
Let's make a fully autonomous robot using Arduino and IR sensors. It can follow a black line on white surface. Watch video for more!
Components used:- Piece of cardboard/ Acrylic sheet
- Arduino Uno
- IR sensor
- BO motor
- Wheels
- Caster wheel
- L293d IC
- PCB
- Flexible wire
- Battery
1 / 4
Fix all components on acrylic sheet and make a chassis as shown in pictures.
1 / 6
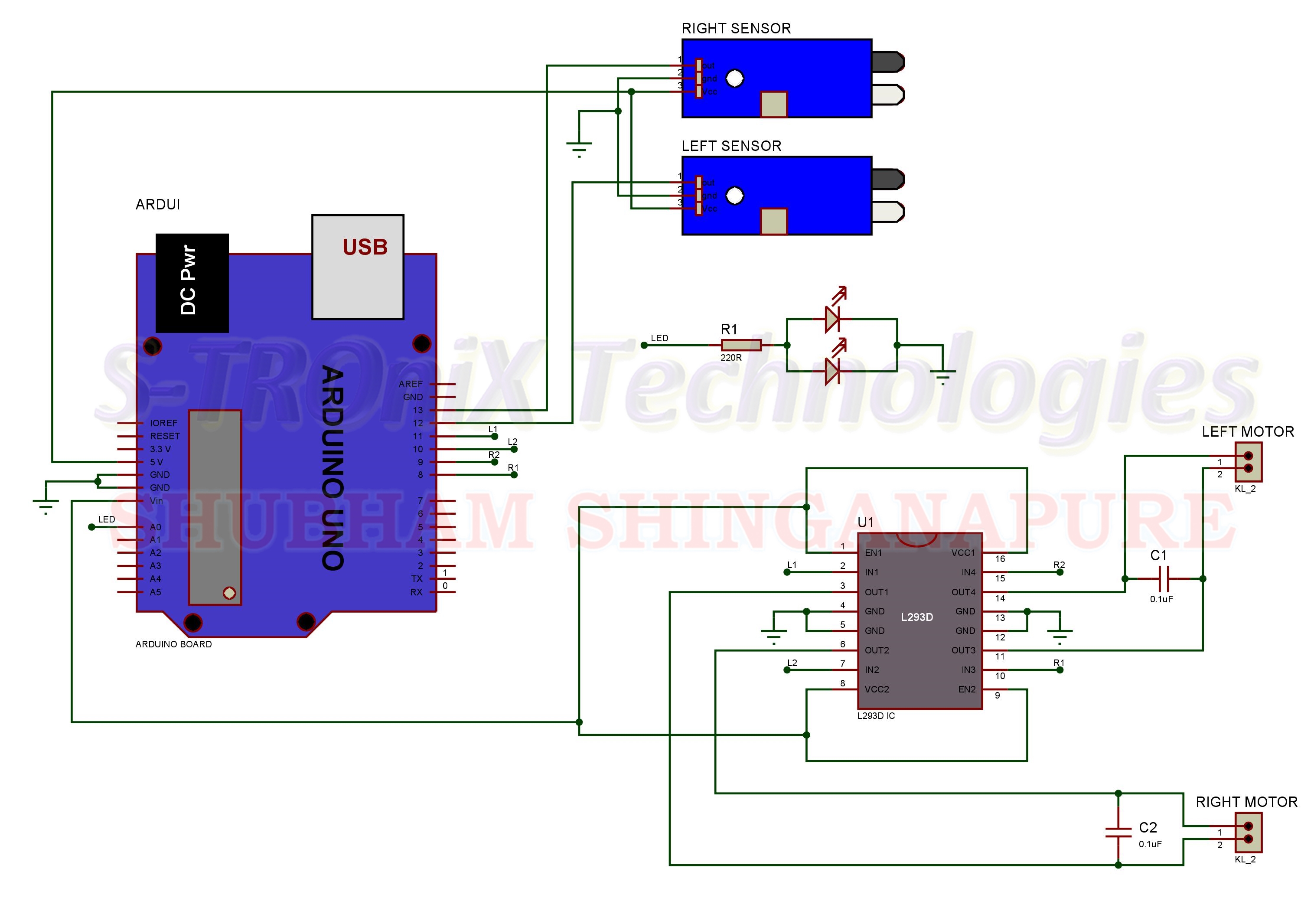
Now make all connection As per the circuit Diagram bellow.
you can make this circuit on dotted pcb like this.
or can use this type of professional looking PCB.
1 / 5
you can order PCB for this Shield from here https://www.pcbway.com/project/shareproject/How_to_Make_Arduino_Based_Edge_Avoiding_Robot.html
or for ready made shield contact us on: https://www.facebook.com/STROniXTechnologies
Now it's time to program this robot. upload this program to arduino and all done.
//program by Shubham Shinganapure on 05-08-2019
//
//for Line Following Robot using 2IR sensors
int lm1=8; //left motor output 1
int lm2=9; //left motor output 2
int rm1=10; //right motor output 1
int rm2=11; //right motor output 2
int sl=13; //sensor 1 input (left)
int sr=12; //sensor 2 input (right)
int SlV=0;
int SrV=0;
int led=A0;
void setup()
{
pinMode(lm1,OUTPUT);
pinMode(lm2,OUTPUT);
pinMode(rm1,OUTPUT);
pinMode(rm2,OUTPUT);
pinMode(led,OUTPUT);
pinMode(sl,INPUT);
pinMode(sr,INPUT);
sTOP();
}
void loop()
{
SlV=digitalRead(sl);
SrV=digitalRead(sr);
if(SrV==LOW && SlV== LOW)
{
ForWard();
}
if(SrV==HIGH && SlV== LOW)
{
Left();
}
if(SrV==LOW && SlV== HIGH)
{
Right();
}
if(SrV==HIGH && SlV== HIGH)
{
sTOP();
}
}
void ForWard()
{
digitalWrite(lm1,HIGH);
digitalWrite(lm2,LOW);
digitalWrite(rm1,HIGH);
digitalWrite(rm2,LOW);
}
void BackWard()
{
digitalWrite(lm1,LOW);
digitalWrite(lm2,HIGH);
digitalWrite(rm1,LOW);
digitalWrite(rm2,HIGH);
}
void Left()
{
digitalWrite(lm1,LOW);
digitalWrite(lm2,HIGH);
digitalWrite(rm1,HIGH);
digitalWrite(rm2,LOW);
}
void Right()
{
digitalWrite(lm1,HIGH);
digitalWrite(lm2,LOW);
digitalWrite(rm1,LOW);
digitalWrite(rm2,HIGH);
}
void sTOP()
{
digitalWrite(lm1,LOW);
digitalWrite(lm2,LOW);
digitalWrite(rm1,LOW);
digitalWrite(rm2,LOW);
}For more subscribe my youtube channel:

19 projects • 132 followers
I am an Electronics Engineer and hobbyist. Love to work with Machines.





{kind=link}
Comments
Please log in or sign up to comment.