What is your project about?This project is about creating an automated bottle sorting robot using Arduino. The robot is designed to detect and sort metal and plastic bottles using ultrasonic sensors, inductive sensors, and servo motors. It's an innovative solution aimed at improving waste management and recycling efficiency.
Why did you decide to make it?I decided to make this project to address the growing need for efficient and eco-friendly waste management solutions. With the increasing amount of waste generated daily, particularly plastic and metal bottles, there is a pressing need for automated systems that can streamline the recycling process. This robot not only makes recycling more efficient but also promotes environmental sustainability by reducing manual labor and error.
How does it work?
The bottle sorting robot utilizes advanced sensors and actuators to autonomously detect, identify, and sort metal and plastic bottles with precision. Here's a detailed exploration of its operational process:
- Line Following and Human Presence Detection:
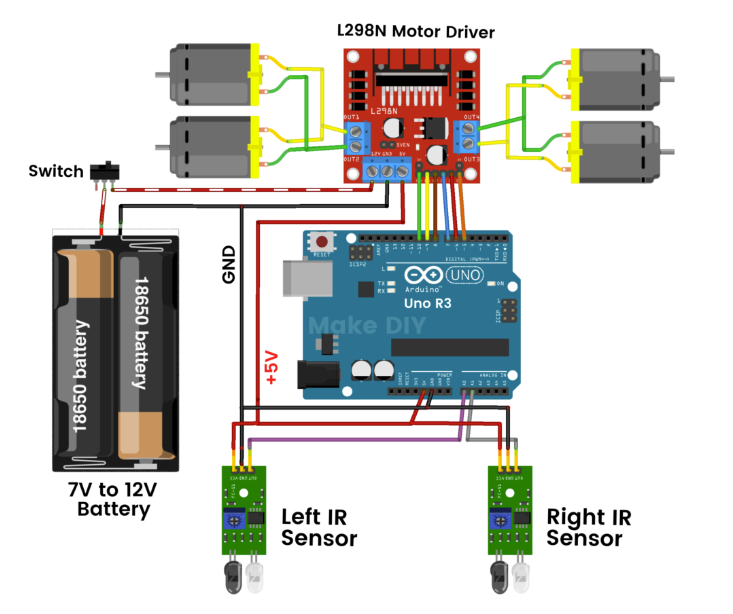
- The robot follows a predefined line path using IR sensors to maintain accurate navigation within its operational area.
- Upon detecting a person approaching, ultrasonic sensors measure the distance. If the person is within range, the robot halts to ensure safe interaction.
- Lid Operation and Bottle Insertion:
- When stationary, the robot allows the person to place their hand near the top, activating an ultrasonic sensor that opens the main door (lid).
- This convenient feature facilitates easy and hygienic insertion of bottles into the robot.
- Bottle Sorting Mechanism:
- Once the lid closes after bottle insertion, a countdown timer initiates. During this period, an inductive sensor identifies whether the inserted bottle is metal.
- If metal is detected within the countdown, the robot opens the metal bin door using a servo motor, directing the bottle into the metal bin.
- If no metal is detected, indicating the bottle is plastic, the plastic bin door opens instead, guiding the bottle into the plastic bin.
- Bin Status Monitoring and Overflow Prevention:
- Each bin (metal and plastic) is equipped with ultrasonic sensors to monitor its fill level.
- If a bin reaches capacity, indicated by the ultrasonic sensor, a warning light on the robot alerts users that the bin is full.
- In this scenario, the corresponding bin door (metal or plastic) will not open during sorting operations, preventing overflow.
- User Interaction for Full Bins:
- Upon encountering a full bin scenario, the robot illuminates the warning light to notify the user.
- The main door (lid) automatically opens, signaling the user to retrieve their bottle since sorting into that bin is temporarily disabled due to capacity constraints.
- Resumption of Operations:
- After the user retrieves their bottle, the lid closes, and the robot resumes its line-following operation, prepared for subsequent interactions.
1 / 4 • images get during building this robot
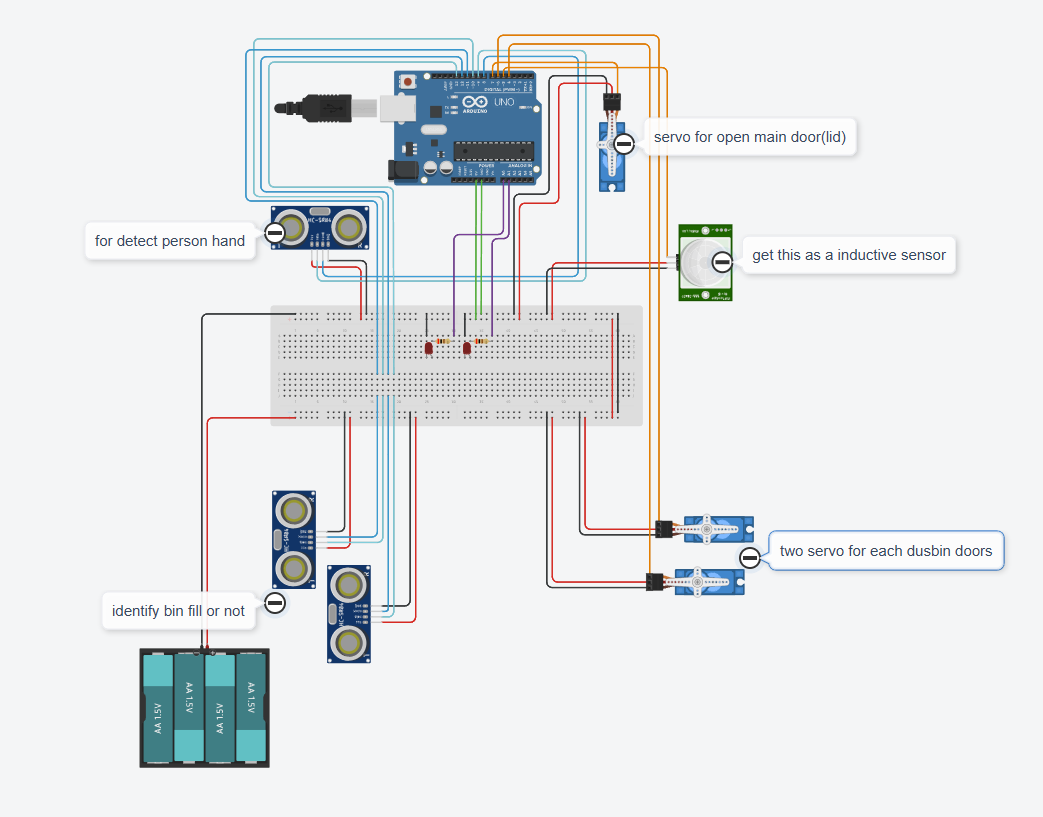
Detailed Circuit Diagram:The circuit diagram below illustrates the wiring and connections of the various components, including the ultrasonic sensors, inductive sensor, servo motors, and Arduino board.
This robot is an excellent example of integrating multiple sensors and actuators to create a functional and intelligent system. By combining ultrasonic sensors for distance and hand detection, an inductive sensor for material identification, and servo motors for precise movement control, this project showcases the potential of Arduino in automating everyday tasks efficiently. Dive into the full Arduino code and explore how you can build and customize your own bottle sorting robot today!






_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)















{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.