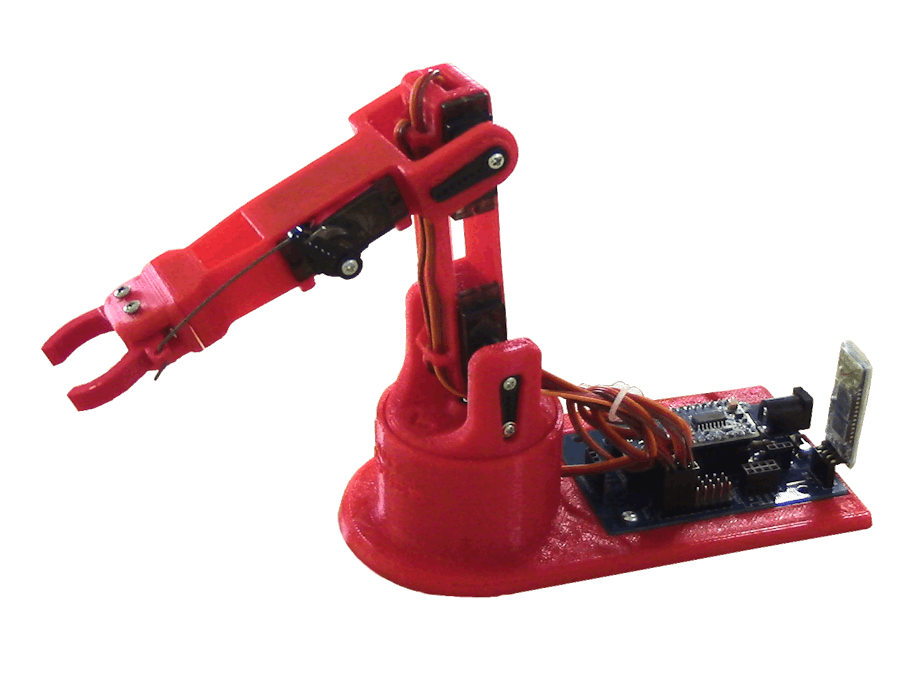
// LittleArm 2C arduino code
// Allows serial control of the LittleArm 2C 3D printed robot arm
// Created by Slant Concepts
#include <Servo.h> //arduino library
#include <math.h> //standard c library
#define PI 3.141
Servo baseServo;
Servo shoulderServo;
Servo elbowServo;
Servo gripperServo;
//+++++++++++++++Global Variables+++++++++++++++++++++++++++++++
struct jointAngle{ //a struct is a way for organizing variables into a group
int base;
int shoulder;
int elbow;
};
struct jointAngle desiredAngle; //desired angles of the servos
int desiredGrip; // disired position of the gripper
int gripperPos; //current position of the gripper
int command; // the set of joint angles
int desiredDelay; // the delay that the servos make btween steps
//int ready = 0; // a marker to used to signal a process is done
//+++++++++++++++FUNCTION DECLARATIONS+++++++++++++++++++++++++++
int servoParallelControl (int thePos, Servo theServo ); //This is a function for controlling the servos
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
void setup() // Setup prepared the Arduino board for operation
{
Serial.begin(9600); // Turn on USB communication (Serial Port) and have it communicate at 9600 bits per second
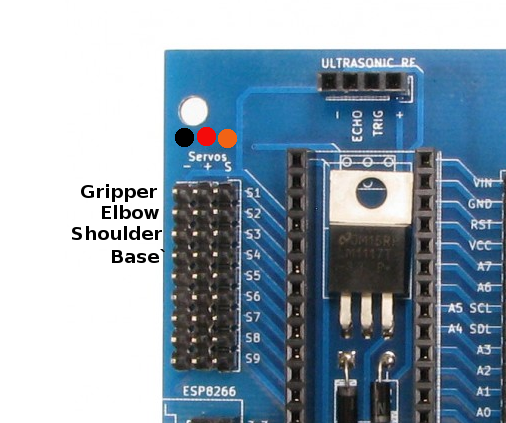
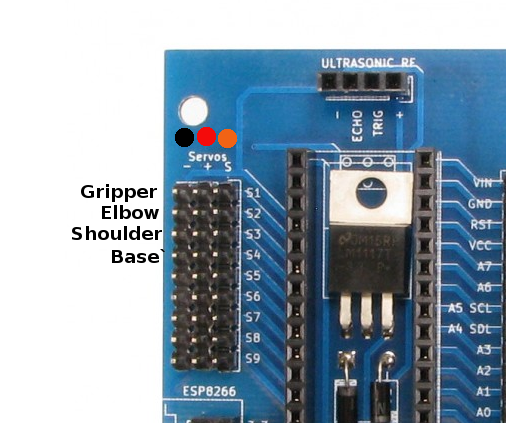
baseServo.attach(5); // attaches the servo on pin 5 to the servo object
shoulderServo.attach(4); // attaches the servo on pin 4 to the servo object
elbowServo.attach(3); // attaches the servo on pin 3 to the servo object
gripperServo.attach(2); // attaches the servo on pin 2 to the servo object
Serial.setTimeout(50); //Stops attempting to talk to computer is no response after 50 milisenconds. Ensures the the arduino does not read serial for too long
Serial.println("started"); // Print to the computer "Started"
baseServo.write(90); //intial positions of servos
shoulderServo.write(100);
elbowServo.write(110);
// ready = 0;
}
//primary arduino loop. This is where all of you primary program must be placed.
void loop()
{
if (Serial.available()){ // If data is coming through the USB port to the arduino then...
// ready = 1; // Ready is set to 1 to indicate that a command is being executed
// Commands are sent from the computer in the form "#,#,#,#,#,\n"
// The code below "parses" that command into integers that correspond with the
// base angle, shoulder angle, elbow angle, grip angle, and delay in the servos, respectively.
desiredAngle.base = Serial.parseInt();
desiredAngle.shoulder = Serial.parseInt();
desiredAngle.elbow = Serial.parseInt();
desiredGrip = Serial.parseInt();
desiredDelay = Serial.parseInt();
if(Serial.read() == '\n'){ // if the last byte is '\n' then stop reading and execute command '\n' stands for 'done'
Serial.flush(); //clear all other commands piled in the buffer
Serial.print('d'); //send completion of the command "d" stands for "done executing"
}
}
// These values are the status of whether or not the joint has reached its position yet
// variables declared inside of some part of the program, like these, are called "local Variables"
int status1 = 0; //base status
int status2 = 0; //shoulder status
int status3 = 0; //elbow status
int status4 = 0; //gripper status
int done = 0 ; // this value tells when all the joints have reached thier positions
while(done == 0){ // Loop until all joints have reached thier positions && ready == 1
//move the servo to the desired position
//This block of code uses "Functions" to make is more condensed.
status1 = servoParallelControl(desiredAngle.base, baseServo, desiredDelay);
status2 = servoParallelControl(desiredAngle.shoulder, shoulderServo, desiredDelay);
status3 = servoParallelControl(desiredAngle.elbow, elbowServo, desiredDelay);
status4 = servoParallelControl(desiredGrip, gripperServo, desiredDelay);
// Check whether all the joints have reached their positions
if (status1 == 1 & status2 == 1 & status3 == 1 & status4 == 1){
done = 1; //When done =1 then the loop will stop
}
}// end of while
}
//++++++++++++++++++++++++++++++FUNCTION DEFINITIONS++++++++++++++++++++++++++++++++++++++++++
int servoParallelControl (int thePos, Servo theServo, int theSpeed ){ //Function Form: outputType FunctionName (inputType localInputName)
//This function moves a servo a certain number of steps toward a desired position and returns whether or not it is near or hase recahed that position
// thePos - the desired position
// thServo - the address pin of the servo that we want to move
// theSpeed - the delay between steps of the servo
int startPos = theServo.read(); //read the current position of the servo we are working with.
int newPos = startPos; // newPos holds the position of the servo as it moves
//define where the pos is with respect to the command
// if the current position is less that the desired move the position up
if (startPos < (thePos-5)){
newPos = newPos + 1;
theServo.write(newPos);
delay(theSpeed);
return 0; // Tell primary program that servo has not reached its position
}
// Else if the current position is greater than the desired move the servo down
else if (newPos > (thePos + 5)){
newPos = newPos - 1;
theServo.write(newPos);
delay(theSpeed);
return 0;
}
// If the servo is +-5 within the desired range then tell the main program that the servo has reached the desired position.
else {
return 1;
}
} //end servo parallel control










{kind=link}
Comments
Please log in or sign up to comment.