OBJECTIVEThis health technology assessment evaluated the effectiveness and budget impact of portable ultraviolet (UV) light surface-disinfecting devices for reducing hospital-acquired infections (HAIs).
INTRODUCTIONEvery year, 1.7 million Americans suffer from a hospital-acquired infection (HAI), according to the US Centers for Disease Control and Prevention. These infections come from many sources, including contaminated hands and unclean hospital surfaces. Studies show that HAIs can be reduced by dedicated cleaning efforts, and in a concerted effort to reduce these infections, healthcare facilities have turned to several disinfection technologies. Ultraviolet light is one very effective way to rid an operating room, patient suite or other healthcare setting of pathogens, simply by setting up an emitter in the room. With no staff (or their hands) present, the risk of human-introduced microbes is reduced even more. No wonder that this technique is taking healthcare facilities by storm. But UV can’t work effectively alone. Not only do current healthcare regulations and guidelines require validation of cleaning by some other method, UV doesn’t reach into every nook and cranny. Therefore, UV, like any other cleaning technique.
Studies have shown that UV treatment is very effective at reducing levels of bacteria—one study cited a 70 percent reduction in bacteria after UV application. UV light can kill cells by bouncing off surfaces, ricocheting light rays into hard-to-reach areas, where the light waves disrupt DNA in cells, ultimately killing them.
UV light in the range of wavelengths between 200 and 300 nm is capable of inactivating microorganisms, such as bacteria and viruses, thus disinfecting both air and solid surfaces. Often, chemical disinfectants are not enough to remove the bacteria and viruses found in hospitals and other contamination prone environment. Rapid decontamination of the used patient-care beds and hospital rooms before admission of subsequent occupants is a major requirement in hospitals in view of the limited availability of beds. Coronavirus is sensitive to UVC light, as in the case of other viruses and bacteria. The germicidal effects of UVC irradiation with a peak intensity at 254 nm results in cellular damage of the virus, thereby inhibiting cellular replication. Unlike chemical approaches to disinfection, UV light provides rapid, effective inactivation of microorganisms through a physical process.
WORKING ENVIRNMENTROS(ROBOT OPEARTING SYSTEM)ROS is an open-source, meta-operating system for your robot. It provides the services you would expect from an operating system, including hardware abstraction, low-level device control, implementation of commonly-used functionality, message-passing between processes, and package management. It also provides tools and libraries for obtaining, building, writing, and running code across multiple computers. ROS is similar in some respects to 'robot frameworks, ' such as Player, YARP, Orocos, CARMEN, Orca, MOOS, and Microsoft Robotics Studio.
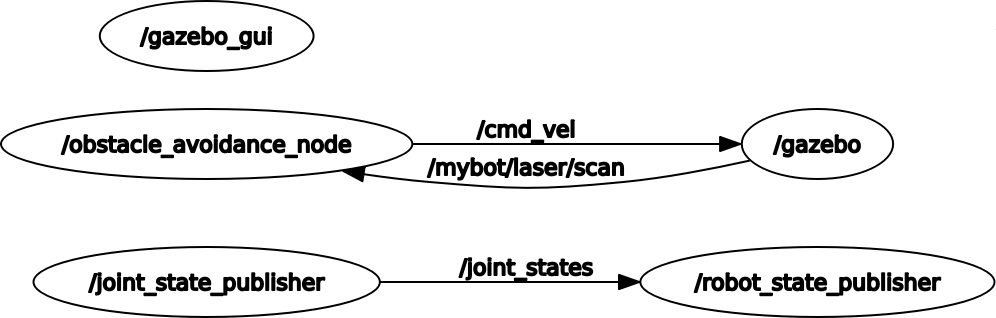
The ROS runtime "graph" is a peer-to-peer network of processes (potentially distributed across machines) that are loosely coupled using the ROS communication infrastructure. ROS implements several different styles of communication, including synchronous RPC-style communication over services, asynchronous streaming of data over topics, and storage of data on a Parameter Server. These are explained in greater detail in our Conceptual Overview.
ROS is not a realtime framework, though it is possible to integrate ROS with realtime code. The Willow Garage PR2 robot uses a system called pr2_etherCAT, which transports ROS messages in and out of a realtime process. ROS also has seamless integration with the Orocos Real-time Toolkit.
ROS currently only runs on Unix-based platforms. Software for ROS is primarily tested on Ubuntu and Mac OS X systems, though the ROS community has been contributing support for Fedora, Gentoo, Arch Linux and other Linux platforms.
While a port to Microsoft Windows for ROS is possible, it has not yet been fully explored.
Software in the ROS Ecosystemcan be separated into three groups:
- language-and platform-independent tools used for building and distributing ROS-based software;
- ROS client library implementations such as roscpp, rospy,and roslisp;
- packages containing application-related code which uses one or more ROS client libraries.
Both the language-independent tools and the main client libraries (C++, Python, and Lisp) are released under the terms of the BSD license, and as such are open source software and free for both commercial and research use. The majority of other packages are licensed under a variety of open source licenses. These other packages implement commonly used functionality and applications such as hardware drivers, robot models, datatypes, planning, perception, simultaneous localization and mapping, simulation tools, and other algorithms.





_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)








{kind=link}
Comments