About the projectSmart Garbage Segregation and Monitoring System is an autonomous system. The user can place waste over the segregator table the sensors over the table identifies it and categorizes waste into dry and wet and the waste is pushed into respective bins. The process continues until the garbage in bins reach its full capacity. When bin is full an alarm rings and an SMS Alert is sent to user notifying the dustbin is full! The user can empty the bin as soon as he/she receives SMS alert.
MotivationThe motivation behind making this project was it is environment friendly and we can implement this at our homes, societies, educational institutes, hospitals, commercial areas etc. This system reduces human efforts of manual segregation and time consumption. It alerts user on time to avoid overflowing of bins and littering premises. It helps in timely disposal of garbage.
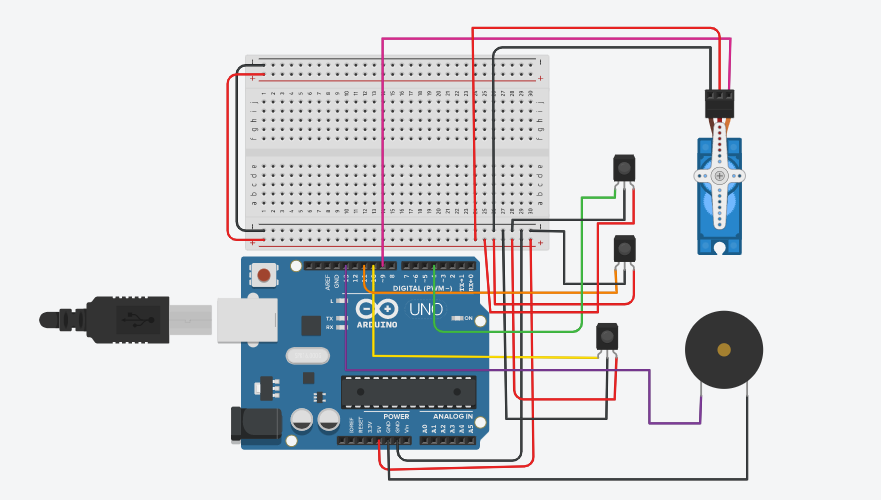
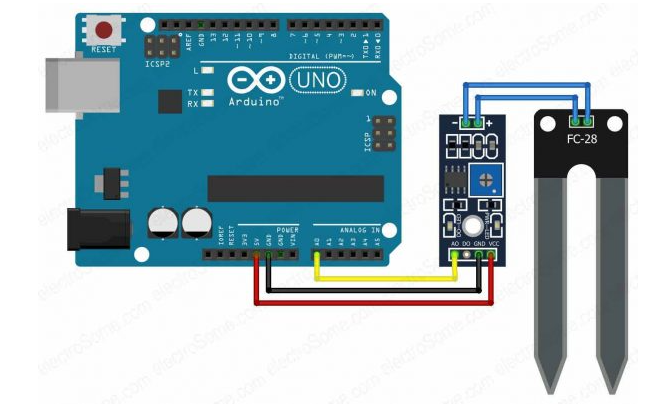
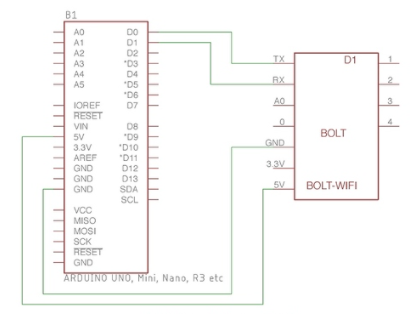
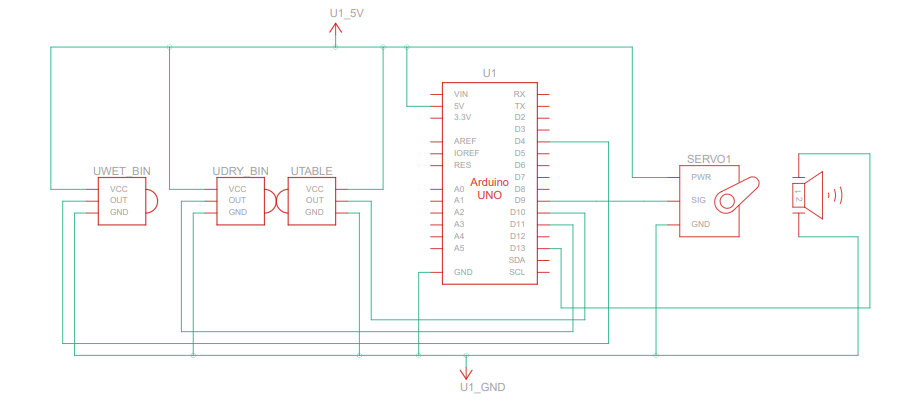
Working of ProjectThe micro servo motor is set to 90 degree when there is no object on the table. When object is placed infrared sensor detects object is present the waste is placed over soil moisture sensor it detects moisture level and based on dry or wet category the waste is pushed by servo motor into respective bins and servo motor comes back to 90 degree. Infrared sensor is placed at brim of both the bins it checks the level of garbage inside bin. When garbage in bin is full a buzzer rings. Serial data status of bin is sent from Arduino to Bolt wifi module and SMS is sent to user here I have used Twilio SMS API service and boltiot python library. You can create Twilio trial account. Note: Create a conf.py file to store bolt cloud API key, device id, Twilio SID, Auth token, twilio trial phone number and user phone number as string. The system gives alert until user empties the bin.








_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)







_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.