


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
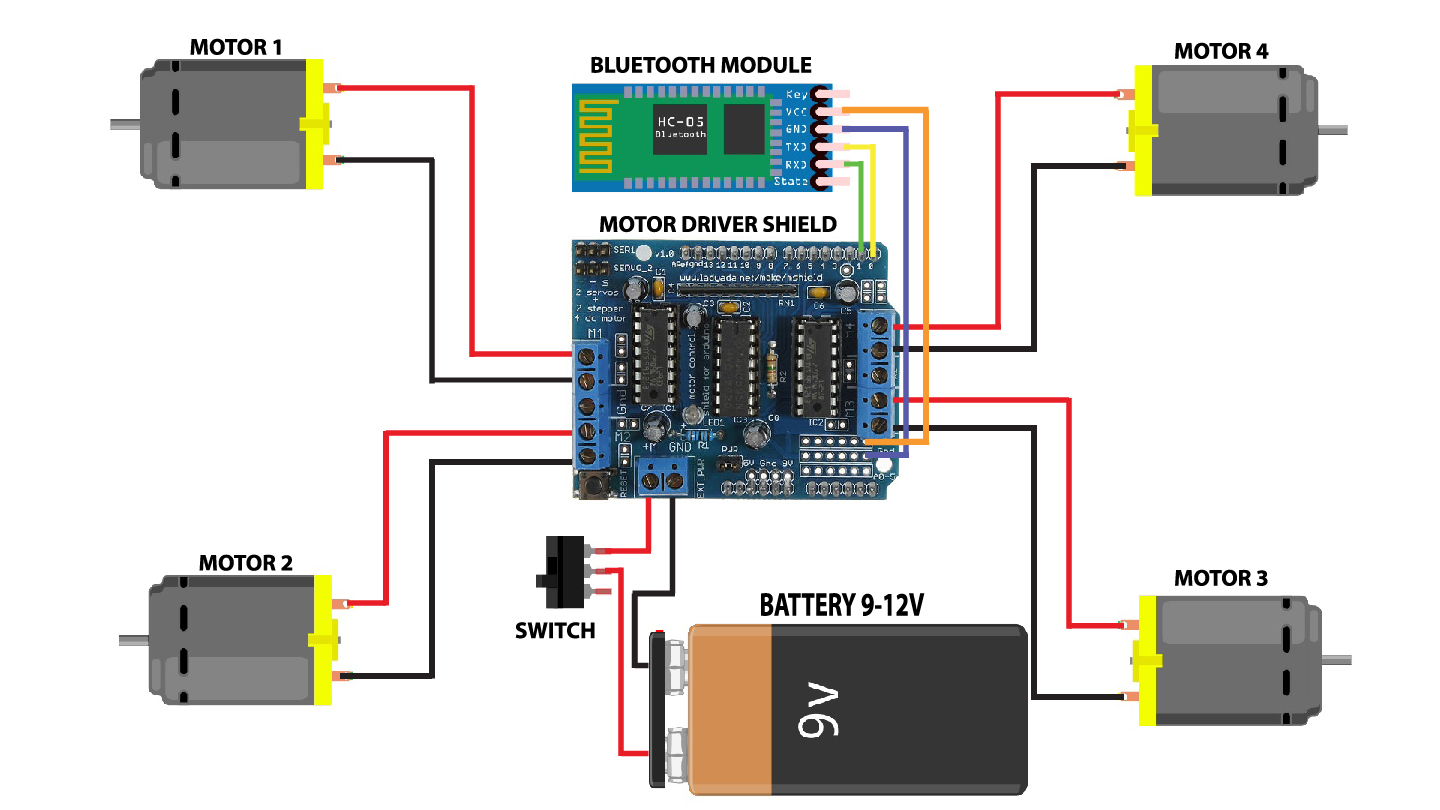
In this project, I will show you how to design and develop a Bluetooth Controlled Robot using Arduino, HC-05 Bluetooth Module and Motor Driver Module. On the other end of the Bluetooth Communication, I will be using a Smart Phone and a simple Android App to control the Robotic Car.
STEP : 1
The Arduino and motor drive combine.
STEP : 2
Connect the BO motors as in image.
STEP : 3
Finish all connection to Ardiuno Board finally were have go to finish the project.
STEP : 4
HC-05 Bluetooth ModuleThe HC-05 Bluetooth Module is responsible for enabling Bluetooth Communication between Arduino and Android Phone.
We have use centre 4 pins only.
VCC
GND
RX
Tx
STEP : 5
We have to finish the project. Last STEP connect bluetooth module to motor shield driver.
STEP : 6
VCC TO 5V
GND TO GND
TX TO TX
RX TO RX
WE HAVE FINSH ALLMOST PROJECT.
I AM have you tube channel as Srimannarayanaa Arduino
LAST BUT NOT LEAST CODING.
{kind=link}

Comments