

Hardware components | ||||||
 |
| × | 1 | |||
| × | 3 | ||||
Software apps and online services | ||||||
 |
| |||||
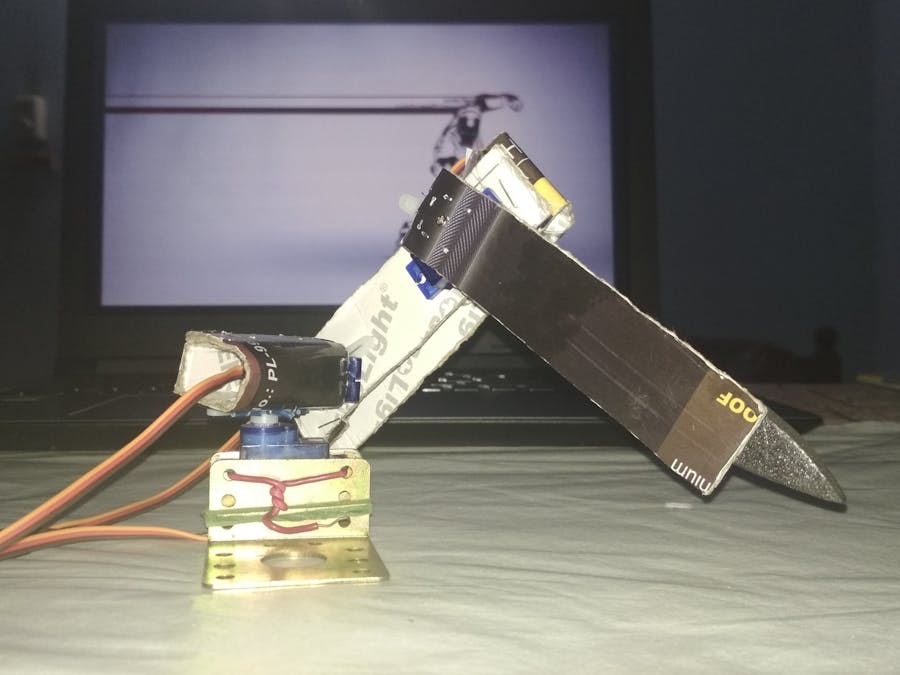
I was planning to build an easy-to-do robotic arm. So with simple materials, like cardboard and iron plates, I made the structure. This arm has a reach of 180 degrees in front of it.
We can control this arm by the means of the computer. I have used only simple logic, like using if-else with the ladder to control this arm using serial communication.
arm on operation
The algorithm used is nothing but if we press a particular key, then the angle of servo (say x) will be incremented (x++). This type of arm can be used where accuracy is required.

5 projects • 9 followers
A Engineering student who just stepped into the world of electronics. Interested in Astronomy,Robotics,Iot,Quantum phenomenon,Ml and AI .


Comments