Prepared with Arduino electronic development board, the robot detects where the fire is thanks to the fire sensors on it. The vehicle moves autonomously towards the fire. When the robot comes to the place where the fire is, the water motor on it works and pours the water.
The code developed for the robot was developed using the Arduino IDE. It was developed using the C/C++ programming language. L298N motor driver is used for DC motors. With the L298N motor driver, two separate motors can be controlled. A switching circuit was installed for the control of the water motor.
Studies similar to ours are available online. The features that distinguish our study from other studies are; is that there is a switching circuit for the water motor, is the use of the water motor. In other studies using water motor, 5V single channel relay was used for water motor. In projects that do not use a water engine, a fire extinguisher or fan engine and propeller are used.
Flame SensorThis sensor is used to detect fire with wavelength between 760 nm – 1100 nm. It has an IR receiver on it. When it detects the small IR waves created by the flames during the fire, it generates a logic signal on the output leg. The operating voltage is 5 volts.
Water pumpIn this project, a mini submersible water pump was used to transfer the water.
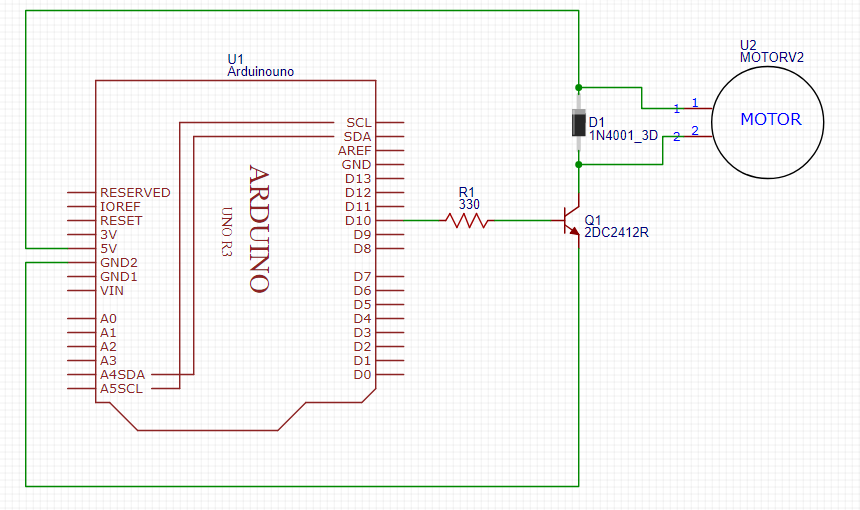
The current that Arduino gives from its digital pins is not enough to run this motor. Therefore, a switching circuit with transistors has been established.
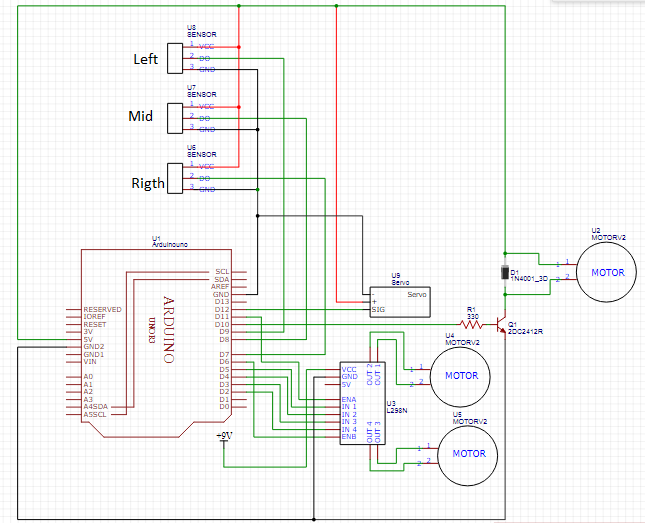
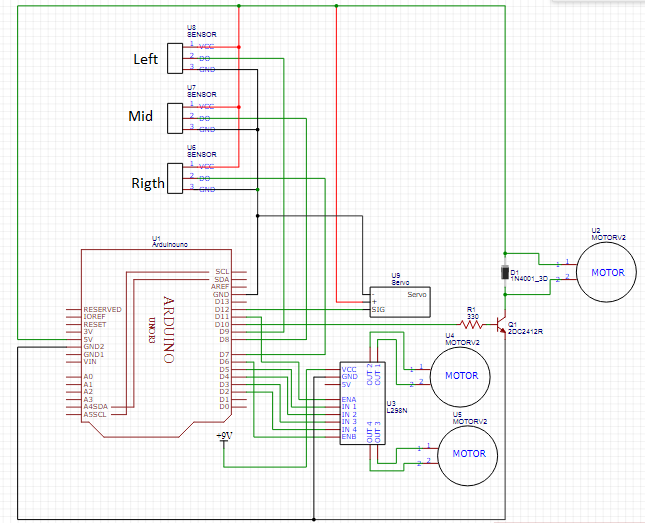
Circuit Diagram
Finally



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)







{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.