From Dusty Dreams to Lunar Leaps: A Next-Gen Robot Arm for Moon MissionsWe carefully developed this marvel with state-of-the-art tools because we were driven by a burning desire to discover the secrets of the moon. Solidworks provided shape to our idea, and Solidworks Simulations and Ansys R3 put it through its paces. What was the outcome? The simulation revealed that there was no significant deformation at temperatures between -126°C and +103°C, which are similar to those on the moon. To achieve this result, we read a lot of existing research papers on material sciences to choose the right material. Not only that, but we were also able to create structures so that the chosen material was not only strong but also able to lift, with the robotic arm weighing only 4 kg and carrying an impressive 9 kg payload on the moon.
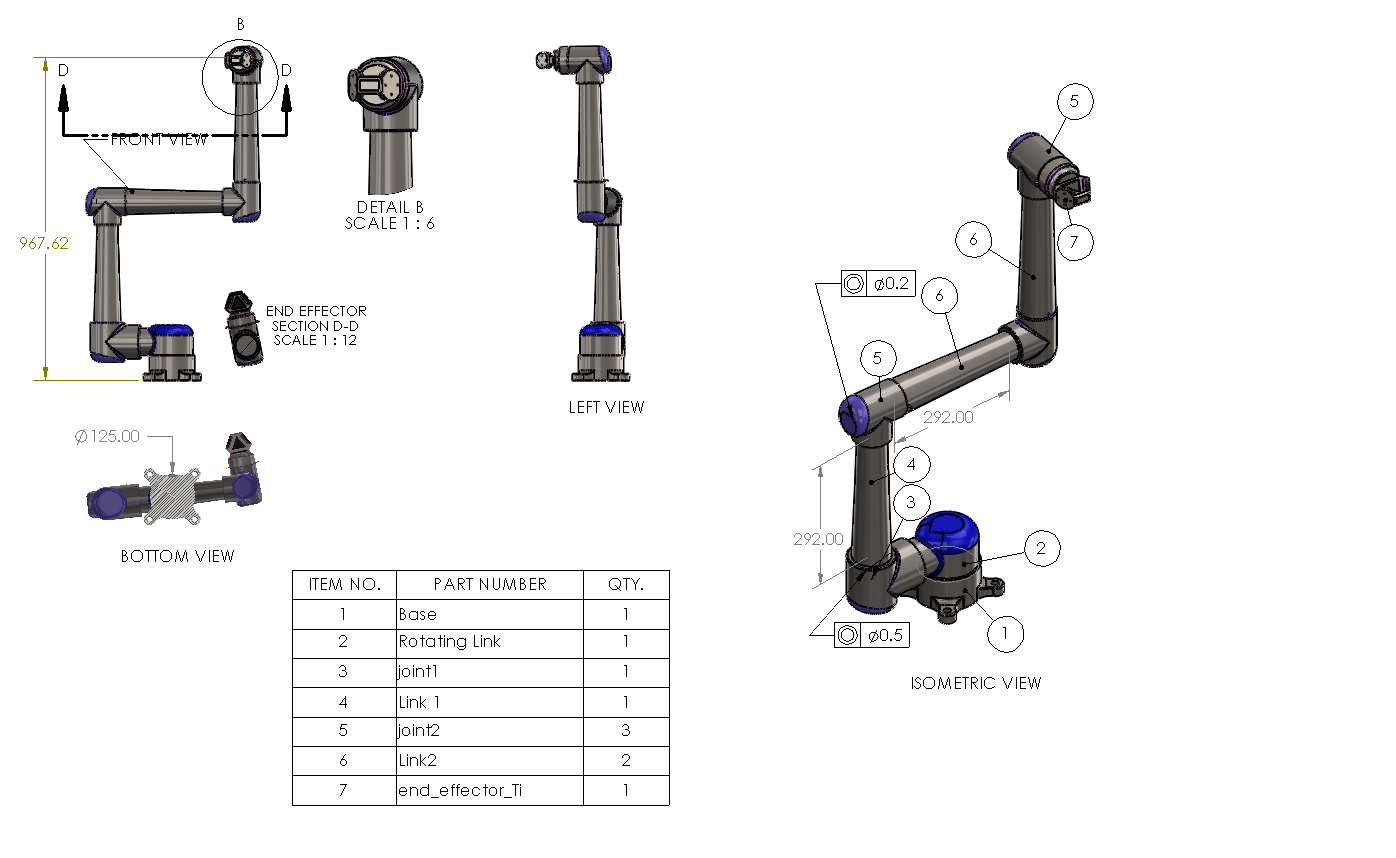
Render of the Robotic ARM (cobot inspired universal Axis Robotic Arm having 5 DEGREES OF Freedom)
RoboDK Simulation of Forward and Inverse kinematics having rescricted motion
It wasn't an easy road, though. An advanced AI was required to plan the robot's complex maneuvers across the lunar surface. This is where MATLAB was useful. We developed a reliable communication interface with ROS2 that enabled us to train an AI on actual lunar data. This artificial intelligence genius makes use of a 3D spatial recognition system to navigate the lunar surface with skill. PRM (probabilistic road mapping) creates a smooth path by interpolating accessible spots and sampling them sequentially.
PRM algorithm for Spacial recognition (spikes on the graph means obstacle probablity around the Robotic arm workspace)
We're not scared even though interplanetary communication is still a barrier. We think thorough ground surveys with different industry experts hold the key. Through a thorough investigation of Earth-based ecosystems, we will collect priceless information to close the communication gap and enable smooth control of robots from Earth.
Working Prototypes 3 DOF articulated:



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)















{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.