


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
The elderly and the physically challenged people often have trouble falling or be in accidents, while moving or while travelling in vehicles. This device would detect the fall or accident and alert the people to the saved contacts.This device can be attached inside the helmet or to vehicles or wheel chairs or could also be kept in the pockets, the device could then track the persons movements.
The system aims to detect sudden changes in body movement indicative of a crash or accident and subsequently trigger a series of alerts.
The battery and the battery management circuit could be placed behind the PCB.
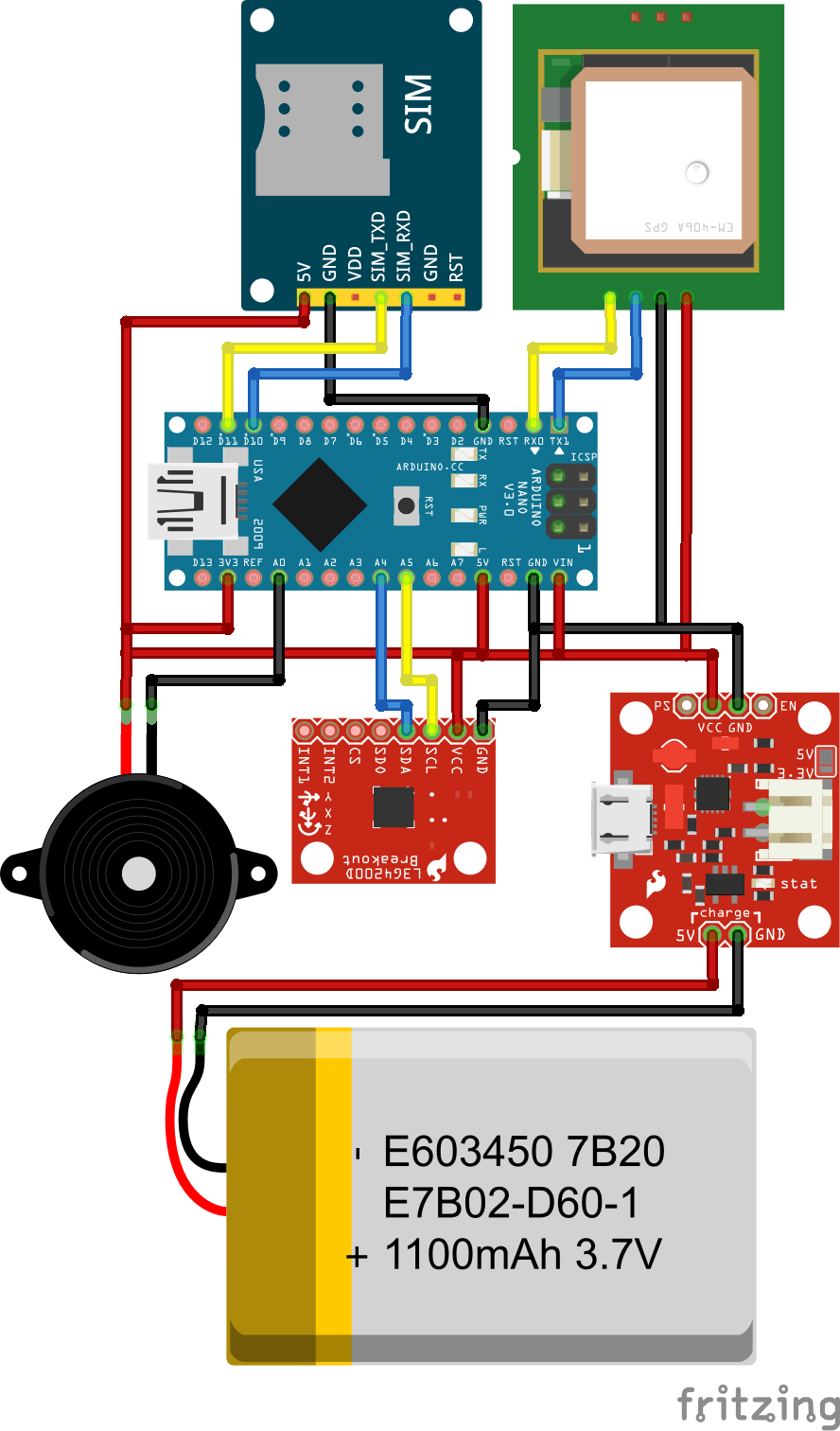
HARDWARE OVERVIEWThe key components of the project include an Arduino Nano, Neo6 GPS module, SIM800 GSM module, 2G micro SIM card, piezoelectric buzzer, and a capacitive button with a resistor. The project operates on the GSM network, eliminating the need for an internet connection.
The accelerometer, specifically the MPU6050, is connected to the Arduino Nano to detect changes in the movement. Upon detecting a crash, the system activates a buzzer for 30 seconds and then initiates a call to the user's mobile phone. Following the call, an SMS alert is sent with the accident's location, presented as a Google Maps link. The system can also function as a GPS tracking system, allowing users to request real-time GPS data.
The algorithm for calculating the crash magnitude is based on a research paper, and the system can distinguish between walking and driving modes. The code includes the necessary libraries and requires users to input their emergency phone number, adjust sensitivity.
Once the Arduino nano detects an unusual change in the movement of the body (vehicle or human), it sends the GPS coordinates of the user to the saved contacts of the user. The GPS coordinates being latitude, longitude and Altitude.
To prevent false alarms, a capacitive button is included, allowing users to stop the system from sending alerts within the first 30 seconds after activation. Sensitivity settings in the code determine the threshold for crash detection, balancing between false alarms and accurate detection.
The buzzer would also start buzzing for a period of 30 seconds, this would also alert the people who are nearby to gain attention and seek help.
Overall, the project provides a comprehensive solution for accident detection, alerting emergency contacts with precise location data to ensure a timely response.The overall design, shape and spacing of the device could be 70% smaller by using SMD components and using space efficient design. This could help save power and would allow more portability.
Always remember, safety comes first








_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


{kind=link}
Comments