

Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 2 | ||||
There are many projects using Radio Control (RC) to control Robot, Car, Lawn, tank...We can control them moving, On/Off, Rotate,... via wireless With RC. We can use Arduino, MCU... to program and communication with RC to control motor driver to do that. But we will spend time for that and spend much time to make them to work stable. Many project we just need they work and save time.
The goal of this project will show how to make a car or robot Lawn by plug and play without any coding for saving time.
- Control speed of two brushed motor by RC signal.
- Control a Rc servo to control position of load.
- Control a Module Relay by RC signal
Use a big power Smart dual H bridge motor driver CCS_2xSHB50A to control two big brushed motors. The driver support radio signal input (PPM) and also support mixed mode (work as tank) So I can connect the driver direct with the RC without any extension hardware.
The CCS_2xSHB50A also support a third channel witch can turn on/off Relay module by RC signal. So I can use that channel to control some things as On/Off the power, On/Off led, or turn on the robot Lawn to cut the grass via wireless.
You can use a battery from 10V-30V to supply for the CCS_2xSHB50A, it is depend on your motor specification. The driver CCS_2xSHB50A also supply 5V, 200mA out. So we can use it to supply for RX module and for a small RC motor.
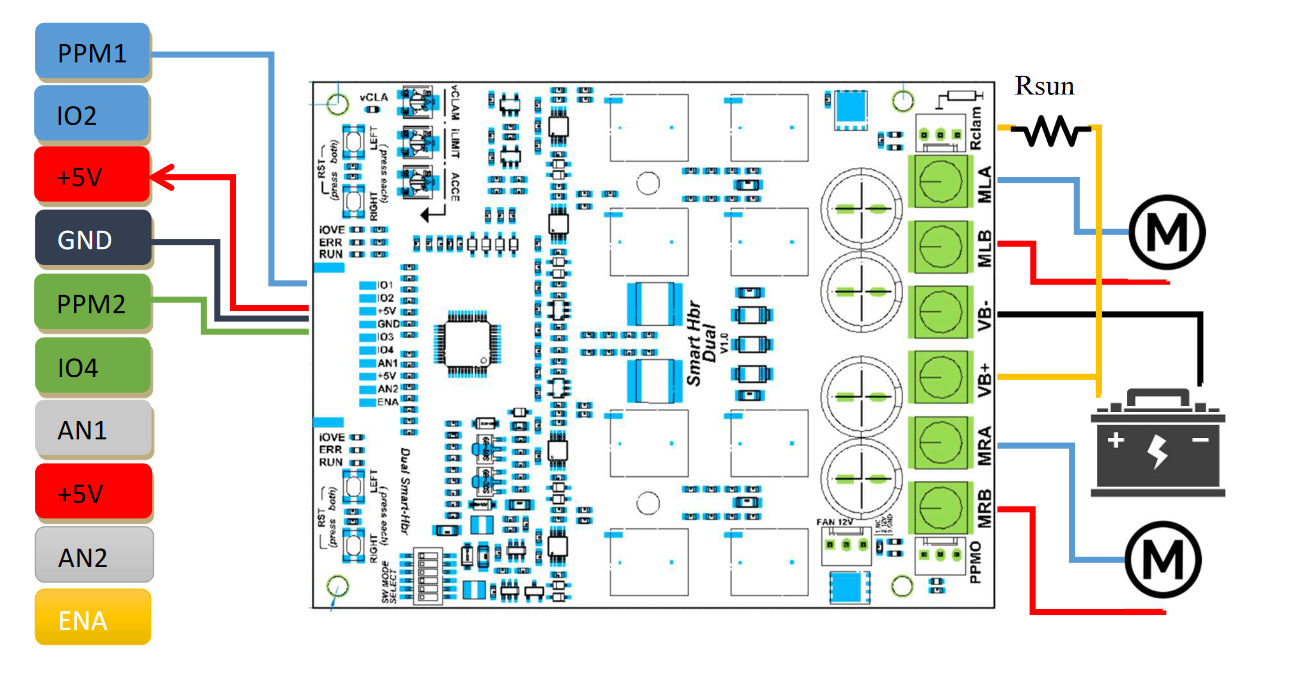
Connection (Please see the schematic for more detail):- Connect two motors to the motor driver (CCS_2xSHB50A)
- Use RC's signal1, signal2 to connect to driver's PPM1 (IO1), PPM2(IO3).
- Use 5V, GND from motor driver to supply power for RX.
- The motor driver's PPMO is linked to PPM3(IO2). We will connect the Relay module to PPMO. When PPM3(IO2) <1.4s the Relay will off and when PPM3>1.6s the Relay will on.
Connect a power supply or battery (range 10-30V) to driver (Note: Please make sure the polarity of power supply
Configuration:- Set driver's to mode1 (RC Mixed Mode)
Testing with two small motors:
Result:



{kind=link}
Comments