Introduction:The high energy from short wavelength UVC light is absorbed in the cellular RNA and DNA, damaging nucleic acids, and preventing microorganisms from infecting and reproducing. This absorption of UVC energy forms new bonds between nucleotides, creating double bonds or “dimers.” Dimerisation of molecules, particularly thymine, is the most common type of damage incurred by UVC light in microorganisms. Formation of thymine dimers in the DNA of bacteria and viruses prevents replication and inability to infect.
UVC disinfection is clinically proven, easy to use and does not result in damage to the fabrication of the area or buildings being treated. This method uses no chemicals, reaches floor to ceiling and is suitable for even the smallest of spaces. It is also extremely portable, meaning it can be used in areas such as ambulances, sluice rooms, theatres, patient rooms, and ambulances. The technology has proven to be a success, eliminating HAI culprits including C. diff, MRSA, New Delhi metallo-beta-lactamase 1 (NDM-1), Ebola and norovirus. So we should handle UVC carefully, so I am making this robot name UV RoboS (Covid Warrior).
This is my 1st Project, So I have started this project with new idea but very simple with my economic mode.
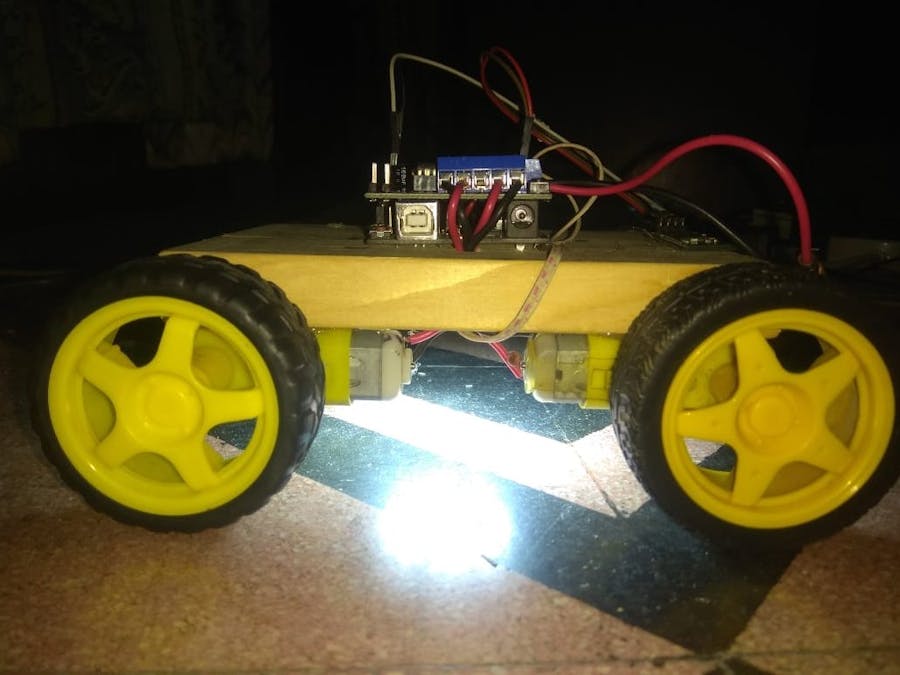
Making:After take those parts, wheels, motor shield, Arduino, Bluetooth and battery I started join those.
I have joined wheels and wires and make car with wood pis. Then it was ready to join with the Micro-controller to operate.
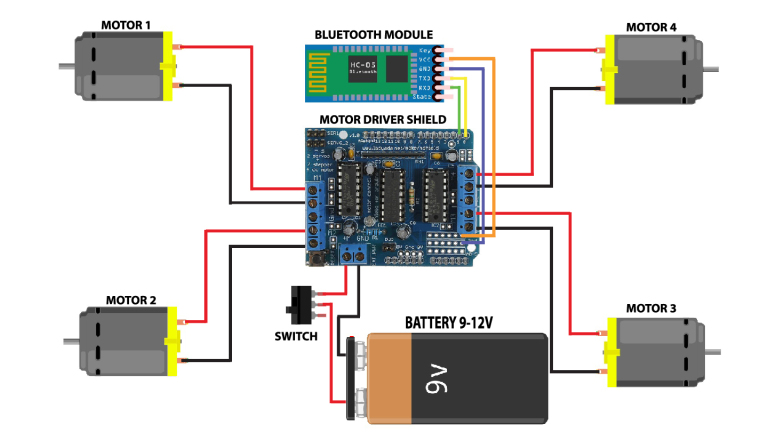
1 / 3 • Joining wires with motor shield.
In this Part I have installed Arduino, Motor shield, and joined Motor's wire with Motor shield.
1 / 3 • Bluetooth Installing
In this part I have adjust the Bluetooth part and adjust the pin and then I had upload the program with the Arduino IDE. I have connected the TX and RX pin with 9 and 10 number pin.
SoftwareSerial bluetoothSerial(9, 10); // RX, TX
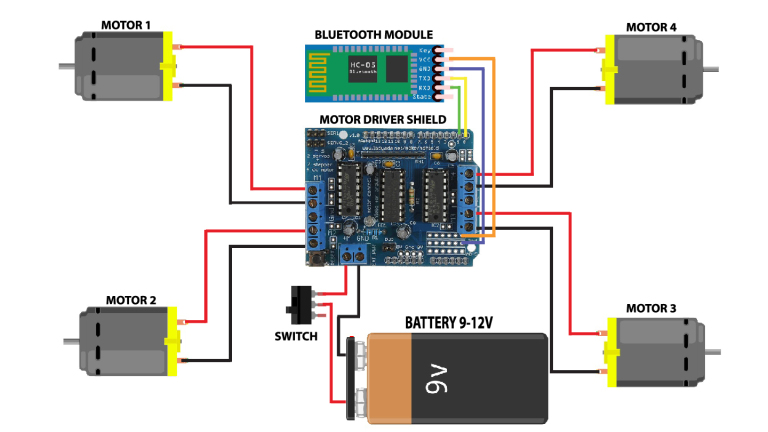
1 / 2 • Joining with cables.
- In the last part I had joined
UV Demo Light and connect with VCC and Ground.
How can UVC disinfection aid in the fight against the spread of COVID-19?The global pandemic has challenged almost every country across the world. Economies have been halted, communities put into lockdown and the healthcare sector has never been put under more pressure than it has in recent months. Wherever there is any form of human interaction, the virus could still be present and therefore deep cleaning regimes need to be rigorous to prevent further spread of this deadly disease. Manual cleaning protocols have been refined and cleaning teams across the globe are working tirelessly to ensure the safety of themselves and the wider healthcare sector. Manual cleaning however can only assist with surface cleaning and this is where UVC technology comes into its own.
While it has been widely recognised for some time that coronavirus can be efficiently and effectively eradicated utilising UVC, it would have been incorrect for companies to suggest that their devices were efficient in killing COVID-19 without further testing. THOR UVC utilises 24 high output emitters supplied to us by Signify, part of the Philips Group of companies. Signify, in conjunction with Boston University, recently tested the current pathogen with their emitters and found COVID-19 was eradicated in minutes. Finsen Tech is now able to verify with confidence that THOR UVC can eradicate COVID-19 contamination in minutes.
Conclusion:
- So now The UV RoboS (Covid Warrior) Sanitize the place without harm any animal.Because the UV light is harmful for animal body and it damage the cells.
- I have set the light under the car so, it will clean the surface without any problem as well as without any contact with any skin. We just need to control the Remote.
- In this Covid-19 Pandemic Situation we can easily Sanitize the room with it.
Thank You. It's My 1st Project so guys Support me:D. 

_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)













_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments