/*
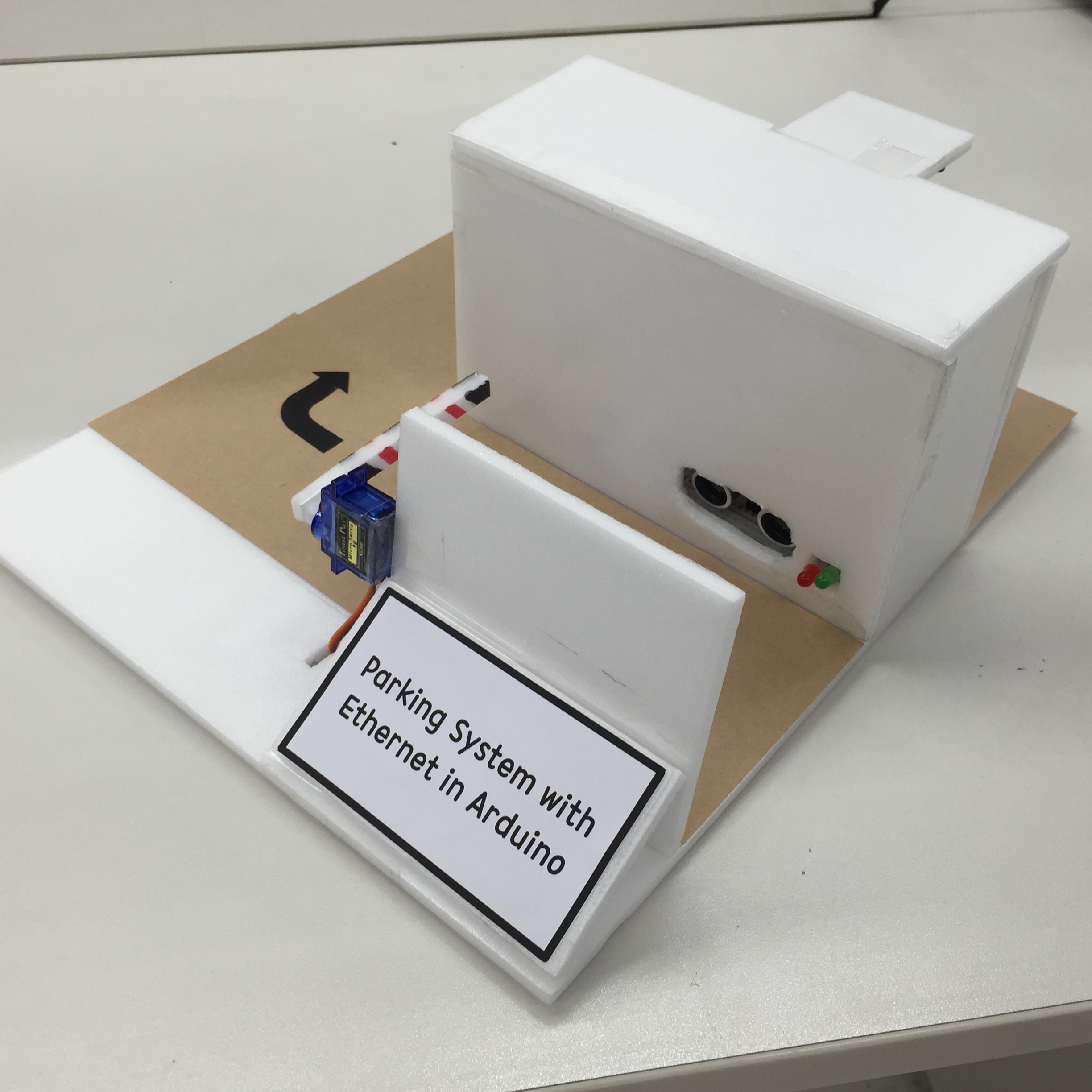
Parking System with Ethernet(Web Server) in Arduino
created 25 Mar 2016
by Jinhee Ahn
*/
#include <SPI.h>
#include <Ethernet.h>
#include <Servo.h>
#if defined(WIZ550io_WITH_MACADDRESS) // WIZ550io MAC .
;
#else
byte mac[] = {0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED}; // mac
#endif
//#define __USE_DHCP__ // DHCP Define
// Static IP
IPAddress ip(192,168,1,177); // IP .
IPAddress gateway( 192, 168, 1, 1 );
IPAddress subnet( 255, 255, 255, 0 );
// fill in your Domain Name Server address here:
IPAddress myDns(8, 8, 8, 8); // google puble dns
// 80
// Socket .
// HTTP 80 .
// IANA(Internet Assigned Numbers Authority) HTTP 80 .
// .
// https://www.iana.org/assignments/service-names-port-numbers/service-names-port-numbers.txt
EthernetServer server(80);
void check_led_status();
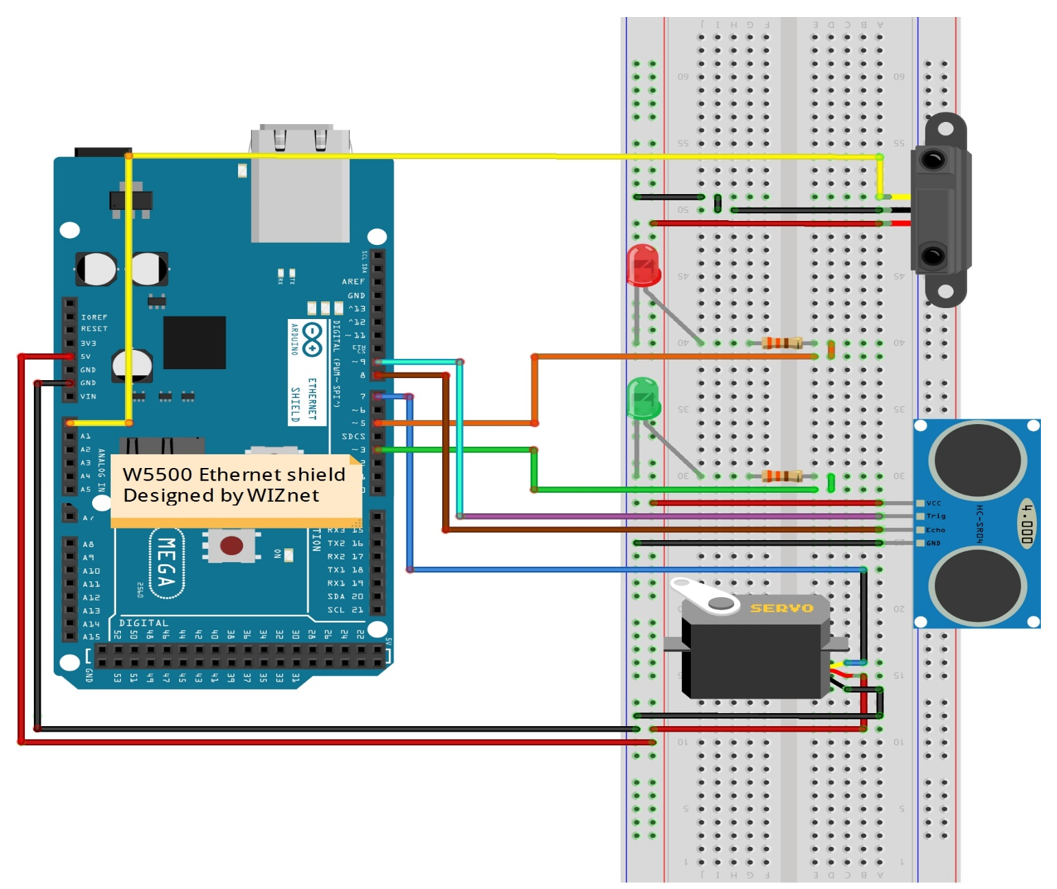
#define close_led 5
#define open_led 3
#define trig 8 // 8 .
#define echo 9 // 9 .
//
int pinNum = A1; // 0
int distance = 0; //
//
float distance2 = 0; //
Servo servo;
void setup() {
servo.attach(7);
Serial.begin(9600);
pinMode(trig, OUTPUT);
pinMode(echo, INPUT);
pinMode(close_led, OUTPUT);
pinMode(open_led, OUTPUT);
pinMode(pinNum, INPUT); //A1 INPUT
servo.write(95);
digitalWrite(close_led, LOW);
digitalWrite(open_led, HIGH);
while (!Serial) {
; // ,
}
//
#if defined __USE_DHCP__ // DHCP ( DHCP )
#if defined(WIZ550io_WITH_MACADDRESS) // WIZ550io MAC
Ethernet.begin();
#else
Ethernet.begin(mac); // MAC
#endif
#else // Static ( )
#if defined(WIZ550io_WITH_MACADDRESS)
Ethernet.begin(ip, myDns, gateway, subnet);
#else
Ethernet.begin(mac, ip, myDns, gateway, subnet);
#endif
#endif
//
server.begin();
Serial.println("Parking Control System");
Serial.print("server is at ");
Serial.println(Ethernet.localIP()); // IP
}
void loop() {
EthernetClient client = server.available(); // Data "size"
// loop
if (client) { // '1' . ( ESTABLISHED ) Data "Size" .
Serial.println("new client");
boolean currentLineIsBlank = true;
String buffer = ""; //
// .
// LISTEN, CLOSE, FIN_WAIT, CLOSE_WAIT Connection .
while (client.connected()) {
//
int data = analogRead(pinNum); //
int volt = map(data, 0, 1023, 0, 5000); // volt 0 5000
distance = (21.61/(volt-0.1696))*1000; //
long start = millis();
// ,
// .
// , .
// 2 .
// , .
digitalWrite(trig, LOW);
digitalWrite(echo, LOW);
delayMicroseconds(2);
digitalWrite(trig, HIGH);
delayMicroseconds(10);
digitalWrite(trig, LOW);
// HIGH , ROW .
// .
unsigned long duration = pulseIn(echo, HIGH);
// 340 , 29 1 .
// , = duration( ) / 29 / 2 .
distance2 = duration / 29.0 / 2.0;
if (client.available()) { //
char c = client.read(); // 1byte c
buffer += c; // 1 byte
Serial.write(c); //
if (c == '\n' && currentLineIsBlank) { // currentLineIsBlank True
// HTTP (\n) , HTTP
// HTTP
client.println("HTTP/1.1 200 OK");
client.println("Content-Type: text/html");
client.println("Connection: close");
client.println("Refresh: 5");
client.println();
//
// client.println("<!DOCTYPE HTML>"); // HTML5
// HTML
client.println("<html>"); // HTML
client.println("<body>");
if (distance > 10) {
client.println("Parking is <font color='blue'>Empty</font>");
}
else {
client.println("Parking is <font color='red'>Full</font>");
}
client.println("<br />");
client.println("<br />");
if(distance2 > 7){
client.println("<font color='red'>There is not a car in front of door !!</font>");
}
else if (distance2 < 7) {
client.println("<font color='green'>There is a car in front of door !!.</font>");
}
client.println("<br />");
client.println("<br />");
if (digitalRead(open_led) == LOW) { // LED PORT '1' LED ON, LED OFF
client.println("<font color='blue'>Door is open</font>"); // LED ON
}
else {
client.println("<font color='red'>Door is close</font>"); // LED OFF
}
client.println("<br />");
client.println("<FORM method=\"get\" action=\"/parking.htm\">");
client.println("<P> <INPUT type=\"radio\" name=\"status\" value=\"1\">Door is OPEN");
client.println("<P> <INPUT type=\"radio\" name=\"status\" value=\"0\">Door is CLOSE");
client.println("<P> <INPUT type=\"submit\" value=\"Submit\"> </FORM>");
client.println("</body>");
client.println("</html>");
/*
if(distance2 > 20){
servo.write(0);
digitalWrite(close_led, LOW);
digitalWrite(open_led, HIGH);
}
else if (distance2 < 20) {
servo.write(90);
digitalWrite(close_led, HIGH);
digitalWrite(open_led, LOW);
}*/
// HTML
break;
}
if (c == '\n') { // Clear
currentLineIsBlank = true;
buffer="";
}
// LED ON
else if ( c == '\r') { // "GET /led.cgi?status=1"
if(buffer.indexOf("GET /parking.htm?status=1")>=0){
// HTTP
client.println("HTTP/1.1 200 OK");
client.println("Content-Type: text/html");
client.println();
// HTML
client.println("<html>");
client.println("<body>");
if(distance2 > 20){
client.println("<font color='red'>There is not a car in front of door.</font>");
}
else if (distance2 < 20) {
client.println("<font color='green'>There is a car in front of door.</font>");
}
client.println("<br />");
client.println("<a href=\"/parking.htm\">Go to control-page</a>"); // Main
client.println("</body>");
client.println("</html>");
servo.write(10);
digitalWrite(close_led, HIGH);
digitalWrite(open_led, LOW);
// HTML DONE
currentLineIsBlank = false;
break;
}
// LED OFF
if(buffer.indexOf("GET /parking.htm?status=0")>=0){ // "GET /led.cgi?status=0"
// HTTP
client.println("HTTP/1.1 200 OK");
client.println("Content-Type: text/html");
client.println();
// HTML
client.println("<html>");
client.println("<body>");
if(distance2 > 20){
client.println("<font color='red'>There is not a car in front of door.</font>");
}
else if (distance2 < 20) {
client.println("<font color='green'>There is a car in front of door.</font>");
}
client.println("<br />");
client.println("<a href=\"/parking.htm\">Go to control-page</a>"); // Main
client.println("</body>");
client.println("</html>");
servo.write(95);
digitalWrite(close_led, LOW);
digitalWrite(open_led, HIGH);
// HTML DONE
currentLineIsBlank = false;
break;
}
}
// \r \n Data .
else{ //if( c != '\r') {
// you've gotten a character on the current line
currentLineIsBlank = false;
}
}
}
delay(1);
client.stop(); // TCP Connection
Serial.println("client disonnected");
}
}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)











{kind=link}
{kind=link}
Comments