


All Contents of the kits. Kits include key components such as an Arduino, a Elegoo made shield, battery pack, and chargers.
Step 1: Two acrylic shields are found at the bottom of the kit are the main structure to the robot. In the picture below, they are oriented where the bottom of the picture is the front of the robot.
Step2: Motor blocks, from the small bag labelled For Motor are attached to each of the motors. Make sure that the motor block is on the same side as the black/red cables. I'd also recommend fitting the wheels on briefly to ensure that the motor blocks are on the right side. Use the green screwdriver.
Step3: The motors are fitted onto the acrylic board without the rectangle like shape on the end. Ensure that the white end of the motors are facing outwards.
Step4: The L298N driver board, used to control the motors, is being prepared to be attached to the acrylic board. Note the white spacers that are attached to the bottom. The screws and the white spacers are found in the mini bag labelled ForUno,L298N.
Step5: The L298N driver board are attached to the acrylic board on the same side as the motors. The washers are found in the mini bag labelled ForUno,L298N.
Step6: The Line Tracing module is attached to the opposite side of the acrylic board. The copper colored screws are attached to the line tracing module, with the washers on the side with the actual line tracing module. The silver colored screws are then used to attached the line tracing module to the acrylic board.The screws and the white spacers are found in the mini bag labelled ForLineTracing.
Step7: The Arduino R3 is being prepared to be attached to the acrylic board. Note the white spacers that are attached to the bottom. The screws and the white spacers are found in the mini bag labelled ForUno,L298N.
Step8: The Arduino R3 are attached to the other acrylic board on the same side as the motors. The washers are found in the mini bag labelled ForUno,L298N.
Step9: The main robot control shield, designed by Elegoo, is attached to the top of the Arduino.
Step 10: The battery pack is attached to the end of the acrylic board with screws and nuts. This was probably one of the hardest steps when assembling the robot, as the screws and nuts kept getting stuck in the holes. It'll take time. The washers are found in the mini bag labelled ForCellBox.
Step11: The DC Motor, used to control and turn the Ultrasonic Sensor, is attached to the acrylic board. The DC Motor is attached to the acrylic board using the screws and nuts from the mini bag labelled ForUltrasonic.
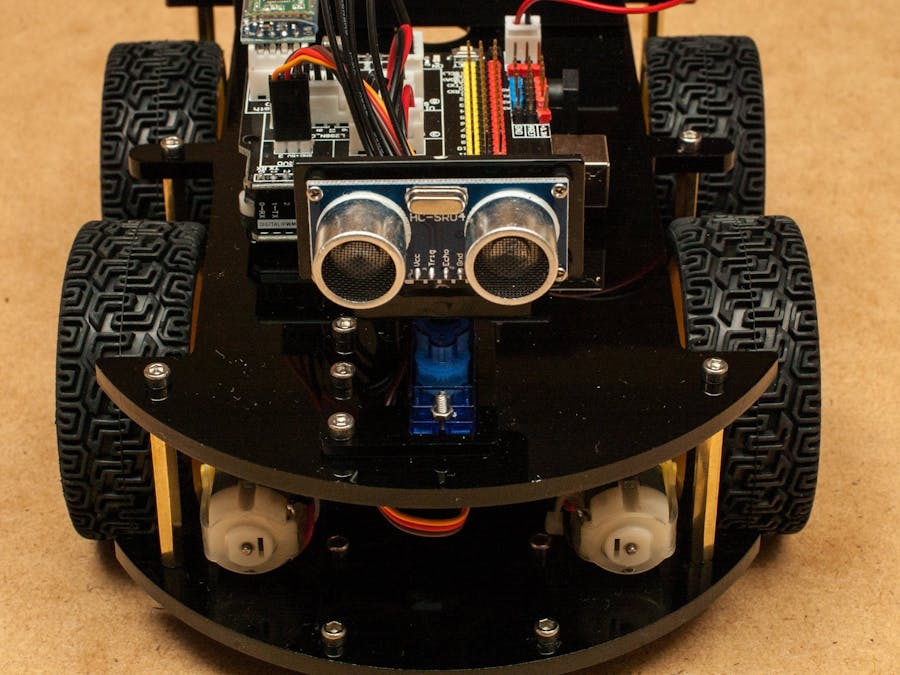
Step12: The Ultrasonic Sensor is attached to the motor using the attaching piece pictured below. The screws and nuts are found from the mini bag labelled ForUltrasonic.
Step13: The Ultrasonic Sensor is securely fastened to the motor using the screws provided in the mini bag with the DC motor.
Step14: To begin the wiring, grab the four black wires and insert one side into the Ultrasonic Sensor and the other into the control shield - specifically the component labelled "Ultrasonic". Don't worry about burning any of the ports, the cables are made in a way that doesn't allow them to be plugged in the wrong way.
Step15: Next, grab the six black wires and insert one side into the motor control shield (on the other acrylic board) and the other into the control shield - specifically the component labelled "L298N Control". Then, grab the black and ride wires, inserting one side into the motor control shield and the other into the control shield - specifically the component labelled "L298N Power".
Step16: Finally, grab the five black and red wires and insert one side into the line tracking device (on the opposite side of the acrylic board) and the other into the control shield - specifically the component labelled "Line Tracking".
Step17: To give the robot bluetooth access, grab the HC-08 Bluetooth Reciever from your kit and insert it into the control shield - specifically the component labelled "Bluetooth UART". A simple final step for the last component.
Step18: You will now be fastening the two acrylic boards together using the chassis standoffs. This is done by fastening the standoffs to the inner part of one of the acrylic boards. Once all six standoffs are in place, carefully lay the other board on the opposite side of the chassis standoffs. Then, screw it in place.
Step19: Now, attach the wheels provided in the kit to each of their respective motors. This is a somewhat tedious process, as the wheel hole and the motor have a tight fit.
Step20: Finally, to ensure that the wheels stay in place - screw them into the motor. Be gentle! You don't want to damage the wheels.
The Elegoo team sent a CD with instructions and software, but I unfortunately didn't have a CD reader. A couple quick Google searches lead me to this page. Simply scroll down to the item labelled "Elegoo Smart Robot Car Kit V3.0" and click it to download. There, I found comprehensive instructions and tutorials about how to work the robot car. The team has created programs to let you interact with the robot using the wireless remote, ultrasonic sensor, bluetooth module (your phone or tablet), and the line sensor. I liked the prospect of controlling the robot using my phone, so I decided to get that one.
Step 1: Navigate to your app store (Android or Apple) and search "ELEGOO BLE Bluetooth". Download the app.
Step2: To configure the Bluetooth module, you must upload the following code to your Elegoo Arduino.
//www.elegoo.com
#define ENA 5
#define ENB 6
#define IN1 7
#define IN2 8
#define IN3 9
#define IN4 11
#define LED 13
unsigned char carSpeed = 150;
bool state = LOW;
char getstr;
void forward(){
digitalWrite(ENA,HIGH);
digitalWrite(ENB,HIGH);
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH);
Serial.println("Forward");
}
void back(){
digitalWrite(ENA,HIGH);
digitalWrite(ENB,HIGH);
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW);
Serial.println("Back");
}
void left(){
analogWrite(ENA,carSpeed);
analogWrite(ENB,carSpeed);
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH);
Serial.println("Left");
}
void right(){
analogWrite(ENA,carSpeed);
analogWrite(ENB,carSpeed);
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW);
Serial.println("Right");
}
void stop(){
digitalWrite(ENA,LOW);
digitalWrite(ENB,LOW);
Serial.println("Stop!");
}
void stateChange(){
state = !state;
digitalWrite(LED, state);
Serial.println("Light");
}
void setup() {
Serial.begin(9600);
pinMode(LED, OUTPUT);
pinMode(IN1,OUTPUT);
pinMode(IN2,OUTPUT);
pinMode(IN3,OUTPUT);
pinMode(IN4,OUTPUT);
pinMode(ENA,OUTPUT);
pinMode(ENB,OUTPUT);
stop();
}
void loop() {
getstr = Serial.read();
switch(getstr){
case 'f': forward(); break;
case 'b': back(); break;
case 'l': left(); break;
case 'r': right(); break;
case 's': stop(); break;
case 'a': stateChange(); break;
default: break;
}
}
Step3: Now, open up the app and press connection in the top left corner.
Step 4: Turn on your Robot Car using the switch on the battery pack. You should get an option for a device named HC-08. I found that it takes a bit of time for it to connect after you click it.
Step5: Click the Keyboard tab and hold on the center button in the first row. Then, fill out the information with the following:
- Row 1 Center: Forward, f, Forward, f, Green
- Row 2 Left: Left, l, Left, l, Pink
- Row 2 Center: Stop, s, Stop, s, Red
- Row 2 Right: Right, r, Right, r, Purple
- Row 3 Center: Back, b, Back, b, Blue
You should end up with something like this:
Step6: Play! Have some fun with the robot and let me know what you think. I will be updating this tutorial later to include code with the ultrasonic sensor, line tracker, and the wireless remote.
CreditThanks to Elegoo for sending me their awesome Robot Car kit. Check out their cool products here. Also, check out Chris Romer's awesome tutorial here - where I got almost all my pictures from.




Comments
Please log in or sign up to comment.