Have you ever had to leave a party or a family gathering early or even felt uncomfortable somewhere far away from home because you don't remember if you fed the dog?
Well, fear no more because this dog food dispenser will allow you to leave the house without worrying about your dog's well being. With access to WiFi from anywhere around the globe you can serve your dog the food that it needs while you enjoy the rest of the day out by the push of a button, with live updates of when you dog is near the food bowl.
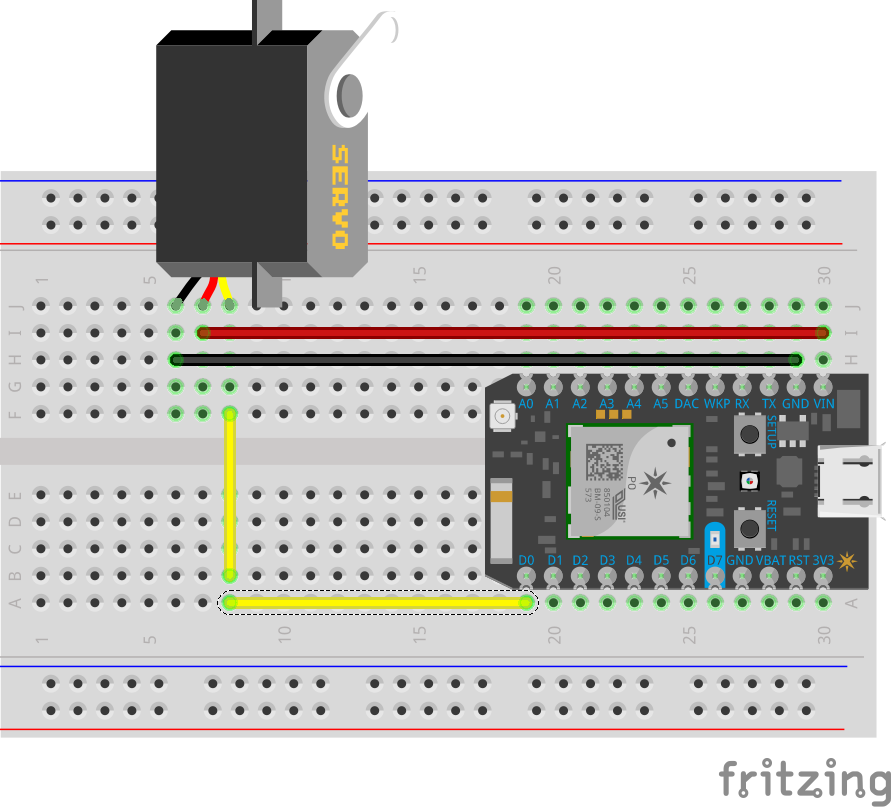
Main Photon: Servo Food Dispenser
Servo rotates to dispense food
Servo attached to wooden flap will open when triggered by pressing push button whenever both photons are connected to Wifi.
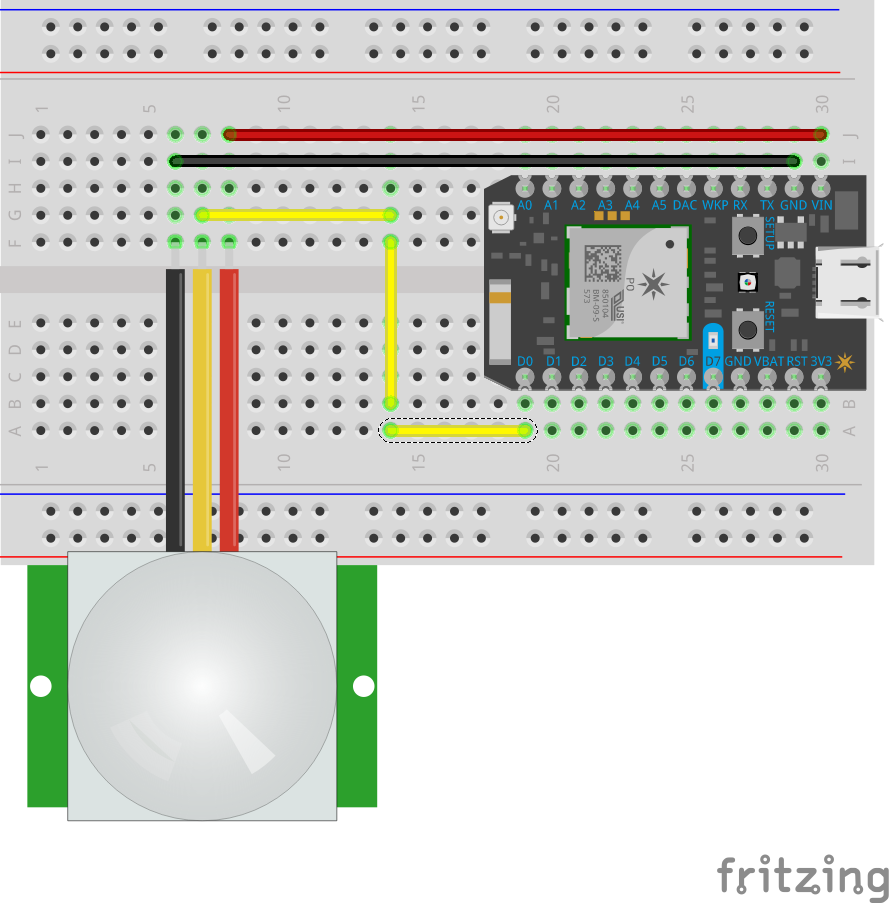
2nd Photon: PIR Motion Sensor
PIR motion sensor will publish a live update on thingspeak when motion is detected. Range and sensitivity are modified to lowest settings to hopefully only detect motion of dog near food bowl.
First PDF file for laser cutter. This is the file that would be used for printing on 1/4''x12''x24'' wood. Parts: top layer 4.5'' hole, middle layer 2'' hole, 2 legs.
Frame 2 PDF File
Second PDF file for laser cutter. This is the file that would be used for printing on 1/4''x12''x24'' wood. Parts: third layer 1'' hole, custom funnel sides and slide, servo flap.
Frame 1 SVG File
This file can be used in Inkscape to be modified to individual preferences.
Frame 2 SVG File
This file can be used in Inkscape to be modified to individual preferences.
This code controls the servo treat dispenser. Servo is executed by subscribing to event PressButton which will trigger a signal when the event reads 1. Event PressButton calls function Feeder. This function will string compare a difference of 1 and will execute the servo from position 90 to 270 and back to 90, LED in D7 will be activated, this corresponds to if statement.
inty=0;ServoFoodServo;intservoPos=270;intDelay1=2000;intDelay2=5000;intDelay3=1000;voidsetup(){pinMode(D7,OUTPUT);FoodServo.attach(D0);Particle.subscribe("PressButton",Feeder,"3c0055000851363136363935");//subscription to photon that executes pressed button code}voidFeeder(constchar*event,constchar*data){if(strcmp(data,"1")==0)//in event that reads 1, servo will be executed{digitalWrite(D7,1);FoodServo.write(90);delay(Delay1);FoodServo.write(270);delay(Delay2);FoodServo.write(90);delay(Delay3);digitalWrite(D7,0);}//nothing will happen}
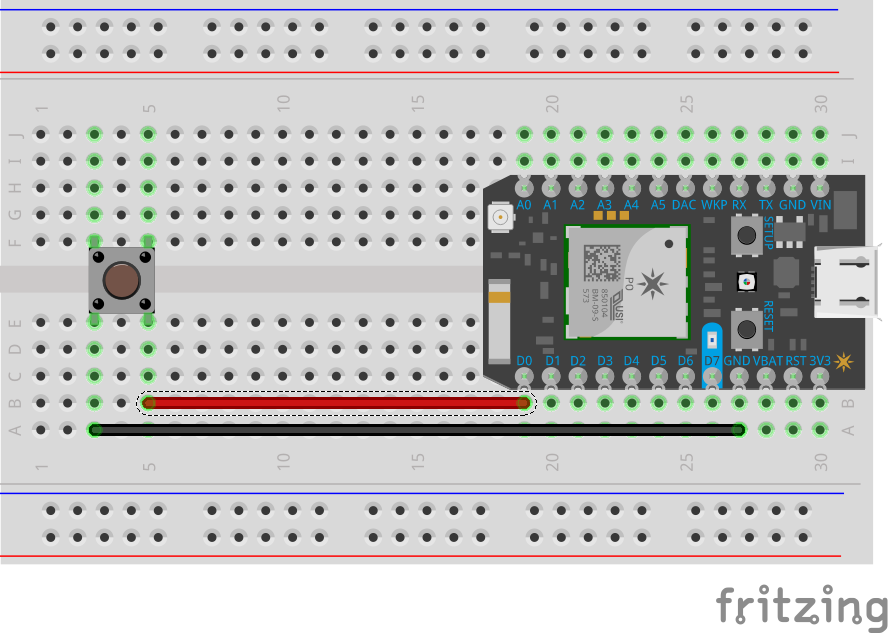
Button
C/C++
This code executes pressed button functionality. When button is pressed reading will be low by cutting connection which will publish a charcter 1 and turn LED in D7 on, which is if statement. Else if statement declares that when button is not pressed connection will be high, LED in D7 is off and nothing will be published.
intledPin=D7;// Our button wired to D0intbuttonPin=D0;voidsetup(){// For input, we define the// pushbutton as an input-pullup// this uses an internal pullup resistor// to manage consistent reads from the devicepinMode(buttonPin,INPUT_PULLUP);// sets pin as input// We also want to use the LEDpinMode(ledPin,OUTPUT);// sets pin as output//Particle.subscribe("Food", MY_DEVICES)}voidloop(){// find out if the button is pushed// or not by reading from it.intbuttonState=digitalRead(buttonPin);// remember that we have wired the pushbutton to// ground and are using a pulldown resistor// that means, when the button is pushed,// we will get a LOW signal// when the button is not pushed we'll get a HIGH// let's use that to set our LED on or offif(buttonState==LOW){// turn the LED OndigitalWrite(ledPin,HIGH);//String press = String(1);Particle.publish("PressButton","1",PUBLIC);// Particle.publish("PressButton", press , PUBLIC);delay(2000);}else{// otherwise// turn the LED OffdigitalWrite(ledPin,LOW);//String press = String(0);//Particle.publish("PressButton", press, PUBLIC);delay(2000);//Particle.publish("PressButton", "0", PUBLIC);}}
PIR Motion Sensor
C/C++
This code executes the PIR motion sensor functionality. When sensor senses motion it will read high and publish character 1 as well at turning LED in D7 on, this is if statement. Else if statement states that when no motion is detected it will read low and publish charcter 0 and LED in D7 will turn off. Publish is also published in https://thingspeak.com/channels/471653.
constStringdata="";intSensor=D0;intled1=D7;voidsetup(){pinMode(Sensor,INPUT);pinMode(led1,OUTPUT);digitalWrite(led1,LOW);digitalWrite(Sensor,LOW);}voidloop(){if(digitalRead(Sensor)==HIGH){//String Motion = String(1);Particle.publish("Sensor1","1",PUBLIC);digitalWrite(led1,HIGH);delay(5000);}// hang tight here until motion stopselseif(digitalRead(Sensor)==LOW){//String Motion = String(0);Particle.publish("Sensor1","0",PUBLIC);digitalWrite(led1,LOW);delay(5000);}}
























_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.