


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
In the future, it is undoubtable that robot will replace human labor. Nowadays, the industrialization of robotic arms has become more mature, more and more people are interested in robotic arms. Before getting know about the industry robots, learning from the educational robots is the most effective way. There are many robotic arms for education and science research, how do we choose in the robotics market?
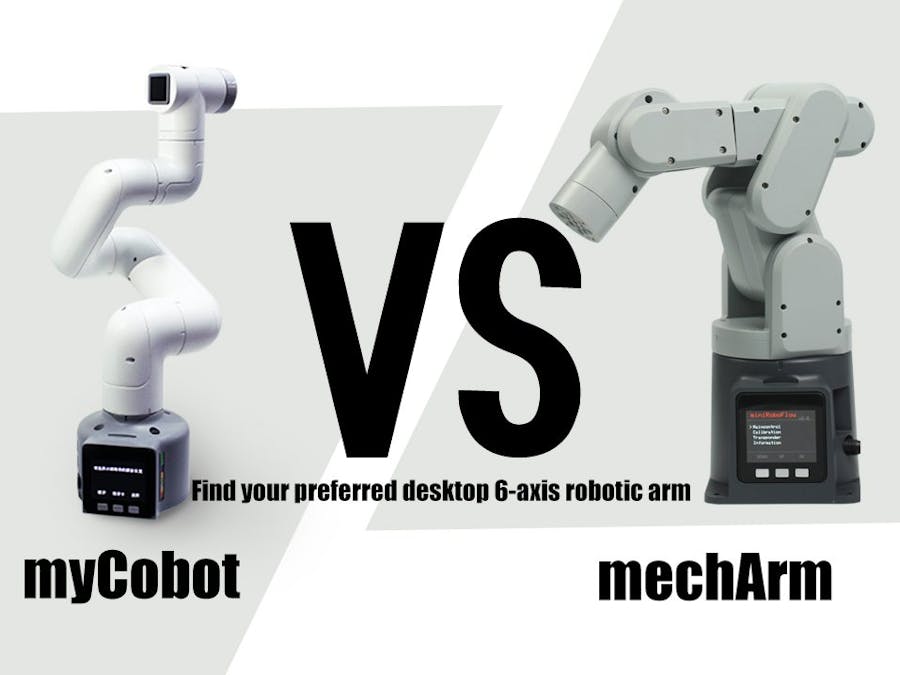
Here we will provide two desktop six-axis robotic arms which are the preferred choices for individual developers who are new to robotics and want to create quick prototypes for personal or industrial use. And we will compare these two robots and help you find the best one for your needs.
First, Let's introduce the differences between the industrial robotic arm and collaborative robotic arm.
Industrial robotic armAs the name suggests, industrial robotic arm can replace human to work in factories, which can reduce production costs, improve productivity, and replace human in dangerous positions.
Collaborative robotic armThe collaborative robotic arm can interact directly with human directly, it means that the collaborative robotic arm can work with human together.
Most industrial robotic arms are in centrosymmetric structure, and collaborative robotic arms are in UR structure.
We will start with the two robotic arms.
IntroductionmyCobot 280-M5Stack:myCobot 280-M5Stack is a 6-axis collaborative robot powered by M5Stack-Basic with multiple functions, it is designed with UR structure.
mechArM 270-M5Stack:mechArm 270-M5Stack is similar with myCobot, but the structure of mechArm is centrosymmetric.
DevelopmentThe two robotic arms can do the same functions. myCobot and mechArm support users to quickly build a robotic arm programming environment and understand the arms control logic. It supports development in multiple languages such as Python, c++, c#, JavaScript, etc. Elephant Robotics provides a Gitbook for quickly building a robotic arm development environment with detailed tutorials on everything from setting up the environment to controlling the robotic arm.
ROS demo
Use slider to control myCobot
MoveIt, Planning the movement of myCobot.
They can also work with AI(artificial intelligent) Kit to learn machine vision and robotic arm movements together.
The interfaces on the end of the robotic arm are the LEGO interfaces, we can use the accessories from Elephant Robotics or make by ourselves through 3D print to complete our development needs.
Moreover, both of them support users to do the secondary development, mainstream programming language development, and complete platform system development.
So what are the differences between them? Let's look at their configuration.
The differences in working radius, positioning accuracy, and range of joint movements are due to their different structures.
StructureThe centrosymmetric structure of mechArm is currently the most widely used and classic type worldwide.
The mechArm's joint 2, 3, and 4 are all bilaterally supported, allowing for a more stable and smooth arm movement, which is why the centrosymmetric structure has been used again for decades.
The UR structured robotic arm joint is work without holding, so it has a wider working radius and can move very flexibly. However, there are some deviations in the movement. Because without the holding, robotic arm needs to rely on the motors to keep stable.
Joint rotation rangemechArm
myCobot
mechArm is limited in terms of movement, myCobot is more flexible.
SummarymechArm is suitable for learning in the direction of industrial robotic arms, while myCobot is suitable for human-machine collaboration scenarios.
Both robotic arms represent the current mainstream types, each with advantages and disadvantages. We hope this article will help you choose a robotic arm that can meet your needs. If you still want to know more, feel free to comment below. If you like this article, please give us your support and praise. Your like is our motivation to update!
Learn more about us:Home | Elephant RoboticsGitHub | Elephant RoboticsShop | Elephant Robotics







Comments
Please log in or sign up to comment.