


Hand tools and fabrication machines | ||||||
 |
| |||||
Author: Automatic Addison
Blog: Create and Visualize a Robotic Arm with URDF – ROS 2 Jazzy
The author provides detailed teaching on how to build a ROS2 project from scratch in his blog. But if you want to quickly test the project, you can follow the steps below.
Preparation:- Development Environment:This tutorial was tested and verified in the Ubuntu 24.04 with ROS2 Jazzy. While it should work in other environments, it is recommended to follow the instructions in the specified setup for optimal compatibility and performance or use Docker to pull the image(successfully tested in Ubuntu 20.04). Please ensure that the correct configurations for RViz, MoveIt, Gazebo, and other components are properly set up to minimize unnecessary errors.
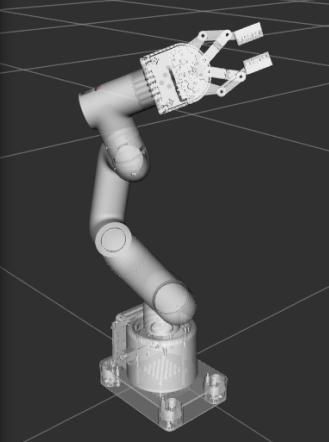
The myCobot 280 series of robotic arms are 6-DOF collaborative robots developed specifically for research, education, technology applications and commercial exhibitions. As they are lightweight tabletop robotic arms, they are perfect for all ages of developers to learn and explore robotics. We provide open source robotic arms urdf models for developers to use.
ROS1: https://github.com/elephantrobotics/mycobot_ros
ROS2: https://github.com/elephantrobotics/mycobot_ros2
mkdir ~/ros2_ws/
Cd ~/ros2_ws/
git clone https://github.com/automaticaddison/mycobot_ros2If you are not familiar with ROS2 or do not know the role of each folder, please refer to this article https://automaticaddison.com/naming-and-organizing-packages-in-large-ros-2-projects/, or re-learn the knowledge of ROS2, This knowledge is significant.
2.Pull the Image (use Docker)Make sure to start your Docker service.
Then, press Ctrl+Alt+T to open a new terminal, input the command, and press Enter.
cd ~/ros2_ws/mycobot_ros2/docker/
bash build.shdocker-compose up --buildCtrl + CStop your test and continue.
docker-compose up -d manipulationxhost +
docker-compose exec manipulation bash
ros2 launch mycobot_description robot_state_publisher.launch.pyYou can adjust the status of the robot and the claw using the sliderbars.
Make sure that you are still in the Docker container
Open your terminal.
echo "alias pointcloud='bash ~/ros2_ws/src/mycobot_ros2/mycobot_mtc_pick_place_demo/scripts/pointcloud.sh'" >> ~/.bashrc
echo "alias pick='bash ~/ros2_ws/src/mycobot_ros2/mycobot_mtc_pick_place_demo/scripts/robot.sh'" >> ~/.bashrcThen, press Enther to acitivate this 2 demos.
pickYou can learn about the motion planning tasks in Rviz.
Thanks to Addison's excellent open source, this article is just a quick installation and testing of the project as a user. Addison provides detailed explanations and tutorials from ROS2 installation to project construction, and his article is perfect for beginners to systematically learn ROS2( https://automaticaddison.com/tutorials/ ).
If you want to test this simulation project with real robotic arm, the myCobot 280 series are perfect for you. We are looking forward to more users using our products for development!




{kind=link}
Comments
Please log in or sign up to comment.