


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
First, watch the video
Hey there! So I'm really a fan of Attiny MCUs, they are small but quite useful in prototyping something final, like for example you need to build a smart switch for AC Light which is triggered by a PIR and relay will toggle the AC light, sure we can use an Arduino for this but using it would cost more, and an Arduino will take more space and honestly, I wouldn't put an Arduino with a PIR inside a switchboard.
so what to do? we use Attiny to shrink the project.
ANYWAYS, let's program attiny84 with Arduino as ICSP.
you can check UTSOURCE.net, they deal in all kinds of electronics components like for example Attiny84 which I'm using in this project and many more components. do check them out.
first, you need to pick the right type of Attiny84, I bought the SMD version but you can use the THT version. my goal was to build a small breakout board for Attiny84 in the future so I bought the SMD version.
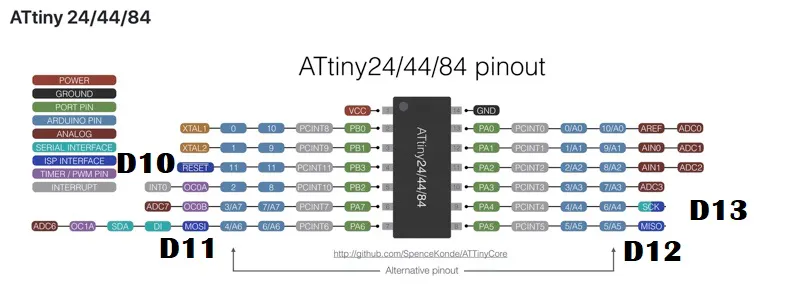
now, goto this GitHub directory and download and install the board file for Attiny MCUs
https://github.com/SpenceKonde/ATTinyCore
after installing, open Arduino as ICSP sketch from example sketches and upload it to your board. (in my case Arduino NANO)
after uploading, put a 10uf 16V CAP between Reset pin and Ground of Arduino.
now put your Attiny84 on the breadboard and get ready for wiring it up with Arduino Nano.
select attiny84 board from the board manager.
do not mess around with the setting too much, just leave everything as it is for now,
select the right COM PORT
and select the programmer "Arduino as ICSP"
then hit burn bootloader.
it will take 30 seconds to 1 min max and you'll be greeted with a message
"Done burning bootloader"
LAST STEP!
in the sketch menu, hit "upload using programmer" and BANG
you have successfully uploaded the sketch to your Attiny84 MCU.
what to do now?
put it on a breadboard and start tinkering!
also, do not forget, its 5V tolerant. supplying voltage greater than 5 will deep fry it.
watch the video if you need a more thorough explanation.
level 2 of this project
https://www.hackster.io/350166/attiny84-breakout-board-c920ee
// ArduinoISP
// Copyright (c) 2008-2011 Randall Bohn
// If you require a license, see
// http://www.opensource.org/licenses/bsd-license.php
//
// This sketch turns the Arduino into a AVRISP using the following Arduino pins:
//
// Pin 10 is used to reset the target microcontroller.
//
// By default, the hardware SPI pins MISO, MOSI and SCK are used to communicate
// with the target. On all Arduinos, these pins can be found
// on the ICSP/SPI header:
//
// MISO °. . 5V (!) Avoid this pin on Due, Zero...
// SCK . . MOSI
// . . GND
//
// On some Arduinos (Uno,...), pins MOSI, MISO and SCK are the same pins as
// digital pin 11, 12 and 13, respectively. That is why many tutorials instruct
// you to hook up the target to these pins. If you find this wiring more
// practical, have a define USE_OLD_STYLE_WIRING. This will work even when not
// using an Uno. (On an Uno this is not needed).
//
// Alternatively you can use any other digital pin by configuring
// software ('BitBanged') SPI and having appropriate defines for PIN_MOSI,
// PIN_MISO and PIN_SCK.
//
// IMPORTANT: When using an Arduino that is not 5V tolerant (Due, Zero, ...) as
// the programmer, make sure to not expose any of the programmer's pins to 5V.
// A simple way to accomplish this is to power the complete system (programmer
// and target) at 3V3.
//
// Put an LED (with resistor) on the following pins:
// 9: Heartbeat - shows the programmer is running
// 8: Error - Lights up if something goes wrong (use red if that makes sense)
// 7: Programming - In communication with the slave
//
#include "Arduino.h"
#undef SERIAL
#define PROG_FLICKER true
// Configure SPI clock (in Hz).
// E.g. for an ATtiny @ 128 kHz: the datasheet states that both the high and low
// SPI clock pulse must be > 2 CPU cycles, so take 3 cycles i.e. divide target
// f_cpu by 6:
// #define SPI_CLOCK (128000/6)
//
// A clock slow enough for an ATtiny85 @ 1 MHz, is a reasonable default:
#define SPI_CLOCK (1000000/6)
// Select hardware or software SPI, depending on SPI clock.
// Currently only for AVR, for other architectures (Due, Zero,...), hardware SPI
// is probably too fast anyway.
#if defined(ARDUINO_ARCH_AVR)
#if SPI_CLOCK > (F_CPU / 128)
#define USE_HARDWARE_SPI
#endif
#endif
// Configure which pins to use:
// The standard pin configuration.
#ifndef ARDUINO_HOODLOADER2
#define RESET 10 // Use pin 10 to reset the target rather than SS
#define LED_HB 9
#define LED_ERR 8
#define LED_PMODE 7
// Uncomment following line to use the old Uno style wiring
// (using pin 11, 12 and 13 instead of the SPI header) on Leonardo, Due...
// #define USE_OLD_STYLE_WIRING
#ifdef USE_OLD_STYLE_WIRING
#define PIN_MOSI 11
#define PIN_MISO 12
#define PIN_SCK 13
#endif
// HOODLOADER2 means running sketches on the ATmega16U2 serial converter chips
// on Uno or Mega boards. We must use pins that are broken out:
#else
#define RESET 4
#define LED_HB 7
#define LED_ERR 6
#define LED_PMODE 5
#endif
// By default, use hardware SPI pins:
#ifndef PIN_MOSI
#define PIN_MOSI MOSI
#endif
#ifndef PIN_MISO
#define PIN_MISO MISO
#endif
#ifndef PIN_SCK
#define PIN_SCK SCK
#endif
// Force bitbanged SPI if not using the hardware SPI pins:
#if (PIN_MISO != MISO) || (PIN_MOSI != MOSI) || (PIN_SCK != SCK)
#undef USE_HARDWARE_SPI
#endif
// Configure the serial port to use.
//
// Prefer the USB virtual serial port (aka. native USB port), if the Arduino has one:
// - it does not autoreset (except for the magic baud rate of 1200).
// - it is more reliable because of USB handshaking.
//
// Leonardo and similar have an USB virtual serial port: 'Serial'.
// Due and Zero have an USB virtual serial port: 'SerialUSB'.
//
// On the Due and Zero, 'Serial' can be used too, provided you disable autoreset.
// To use 'Serial': #define SERIAL Serial
#ifdef SERIAL_PORT_USBVIRTUAL
#define SERIAL SERIAL_PORT_USBVIRTUAL
#else
#define SERIAL Serial
#endif
// Configure the baud rate:
#define BAUDRATE 19200
// #define BAUDRATE 115200
// #define BAUDRATE 1000000
#define HWVER 2
#define SWMAJ 1
#define SWMIN 18
// STK Definitions
#define STK_OK 0x10
#define STK_FAILED 0x11
#define STK_UNKNOWN 0x12
#define STK_INSYNC 0x14
#define STK_NOSYNC 0x15
#define CRC_EOP 0x20 //ok it is a space...
void pulse(int pin, int times);
#ifdef USE_HARDWARE_SPI
#include "SPI.h"
#else
#define SPI_MODE0 0x00
class SPISettings {
public:
// clock is in Hz
SPISettings(uint32_t clock, uint8_t bitOrder, uint8_t dataMode) : clock(clock) {
(void) bitOrder;
(void) dataMode;
};
private:
uint32_t clock;
friend class BitBangedSPI;
};
class BitBangedSPI {
public:
void begin() {
digitalWrite(PIN_SCK, LOW);
digitalWrite(PIN_MOSI, LOW);
pinMode(PIN_SCK, OUTPUT);
pinMode(PIN_MOSI, OUTPUT);
pinMode(PIN_MISO, INPUT);
}
void beginTransaction(SPISettings settings) {
pulseWidth = (500000 + settings.clock - 1) / settings.clock;
if (pulseWidth == 0)
pulseWidth = 1;
}
void end() {}
uint8_t transfer (uint8_t b) {
for (unsigned int i = 0; i < 8; ++i) {
digitalWrite(PIN_MOSI, (b & 0x80) ? HIGH : LOW);
digitalWrite(PIN_SCK, HIGH);
delayMicroseconds(pulseWidth);
b = (b << 1) | digitalRead(PIN_MISO);
digitalWrite(PIN_SCK, LOW); // slow pulse
delayMicroseconds(pulseWidth);
}
return b;
}
private:
unsigned long pulseWidth; // in microseconds
};
static BitBangedSPI SPI;
#endif
void setup() {
SERIAL.begin(BAUDRATE);
pinMode(LED_PMODE, OUTPUT);
pulse(LED_PMODE, 2);
pinMode(LED_ERR, OUTPUT);
pulse(LED_ERR, 2);
pinMode(LED_HB, OUTPUT);
pulse(LED_HB, 2);
}
int error = 0;
int pmode = 0;
// address for reading and writing, set by 'U' command
unsigned int here;
uint8_t buff[256]; // global block storage
#define beget16(addr) (*addr * 256 + *(addr+1) )
typedef struct param {
uint8_t devicecode;
uint8_t revision;
uint8_t progtype;
uint8_t parmode;
uint8_t polling;
uint8_t selftimed;
uint8_t lockbytes;
uint8_t fusebytes;
uint8_t flashpoll;
uint16_t eeprompoll;
uint16_t pagesize;
uint16_t eepromsize;
uint32_t flashsize;
}
parameter;
parameter param;
// this provides a heartbeat on pin 9, so you can tell the software is running.
uint8_t hbval = 128;
int8_t hbdelta = 8;
void heartbeat() {
static unsigned long last_time = 0;
unsigned long now = millis();
if ((now - last_time) < 40)
return;
last_time = now;
if (hbval > 192) hbdelta = -hbdelta;
if (hbval < 32) hbdelta = -hbdelta;
hbval += hbdelta;
analogWrite(LED_HB, hbval);
}
static bool rst_active_high;
void reset_target(bool reset) {
digitalWrite(RESET, ((reset && rst_active_high) || (!reset && !rst_active_high)) ? HIGH : LOW);
}
void loop(void) {
// is pmode active?
if (pmode) {
digitalWrite(LED_PMODE, HIGH);
} else {
digitalWrite(LED_PMODE, LOW);
}
// is there an error?
if (error) {
digitalWrite(LED_ERR, HIGH);
} else {
digitalWrite(LED_ERR, LOW);
}
// light the heartbeat LED
heartbeat();
if (SERIAL.available()) {
avrisp();
}
}
uint8_t getch() {
while (!SERIAL.available());
return SERIAL.read();
}
void fill(int n) {
for (int x = 0; x < n; x++) {
buff[x] = getch();
}
}
#define PTIME 30
void pulse(int pin, int times) {
do {
digitalWrite(pin, HIGH);
delay(PTIME);
digitalWrite(pin, LOW);
delay(PTIME);
} while (times--);
}
void prog_lamp(int state) {
if (PROG_FLICKER) {
digitalWrite(LED_PMODE, state);
}
}
uint8_t spi_transaction(uint8_t a, uint8_t b, uint8_t c, uint8_t d) {
SPI.transfer(a);
SPI.transfer(b);
SPI.transfer(c);
return SPI.transfer(d);
}
void empty_reply() {
if (CRC_EOP == getch()) {
SERIAL.print((char)STK_INSYNC);
SERIAL.print((char)STK_OK);
} else {
error++;
SERIAL.print((char)STK_NOSYNC);
}
}
void breply(uint8_t b) {
if (CRC_EOP == getch()) {
SERIAL.print((char)STK_INSYNC);
SERIAL.print((char)b);
SERIAL.print((char)STK_OK);
} else {
error++;
SERIAL.print((char)STK_NOSYNC);
}
}
void get_version(uint8_t c) {
switch (c) {
case 0x80:
breply(HWVER);
break;
case 0x81:
breply(SWMAJ);
break;
case 0x82:
breply(SWMIN);
break;
case 0x93:
breply('S'); // serial programmer
break;
default:
breply(0);
}
}
void set_parameters() {
// call this after reading parameter packet into buff[]
param.devicecode = buff[0];
param.revision = buff[1];
param.progtype = buff[2];
param.parmode = buff[3];
param.polling = buff[4];
param.selftimed = buff[5];
param.lockbytes = buff[6];
param.fusebytes = buff[7];
param.flashpoll = buff[8];
// ignore buff[9] (= buff[8])
// following are 16 bits (big endian)
param.eeprompoll = beget16(&buff[10]);
param.pagesize = beget16(&buff[12]);
param.eepromsize = beget16(&buff[14]);
// 32 bits flashsize (big endian)
param.flashsize = buff[16] * 0x01000000
+ buff[17] * 0x00010000
+ buff[18] * 0x00000100
+ buff[19];
// AVR devices have active low reset, AT89Sx are active high
rst_active_high = (param.devicecode >= 0xe0);
}
void start_pmode() {
// Reset target before driving PIN_SCK or PIN_MOSI
// SPI.begin() will configure SS as output, so SPI master mode is selected.
// We have defined RESET as pin 10, which for many Arduinos is not the SS pin.
// So we have to configure RESET as output here,
// (reset_target() first sets the correct level)
reset_target(true);
pinMode(RESET, OUTPUT);
SPI.begin();
SPI.beginTransaction(SPISettings(SPI_CLOCK, MSBFIRST, SPI_MODE0));
// See AVR datasheets, chapter "SERIAL_PRG Programming Algorithm":
// Pulse RESET after PIN_SCK is low:
digitalWrite(PIN_SCK, LOW);
delay(20); // discharge PIN_SCK, value arbitrarily chosen
reset_target(false);
// Pulse must be minimum 2 target CPU clock cycles so 100 usec is ok for CPU
// speeds above 20 KHz
delayMicroseconds(100);
reset_target(true);
// Send the enable programming command:
delay(50); // datasheet: must be > 20 msec
spi_transaction(0xAC, 0x53, 0x00, 0x00);
pmode = 1;
}
void end_pmode() {
SPI.end();
// We're about to take the target out of reset so configure SPI pins as input
pinMode(PIN_MOSI, INPUT);
pinMode(PIN_SCK, INPUT);
reset_target(false);
pinMode(RESET, INPUT);
pmode = 0;
}
void universal() {
uint8_t ch;
fill(4);
ch = spi_transaction(buff[0], buff[1], buff[2], buff[3]);
breply(ch);
}
void flash(uint8_t hilo, unsigned int addr, uint8_t data) {
spi_transaction(0x40 + 8 * hilo,
addr >> 8 & 0xFF,
addr & 0xFF,
data);
}
void commit(unsigned int addr) {
if (PROG_FLICKER) {
prog_lamp(LOW);
}
spi_transaction(0x4C, (addr >> 8) & 0xFF, addr & 0xFF, 0);
if (PROG_FLICKER) {
delay(PTIME);
prog_lamp(HIGH);
}
}
unsigned int current_page() {
if (param.pagesize == 32) {
return here & 0xFFFFFFF0;
}
if (param.pagesize == 64) {
return here & 0xFFFFFFE0;
}
if (param.pagesize == 128) {
return here & 0xFFFFFFC0;
}
if (param.pagesize == 256) {
return here & 0xFFFFFF80;
}
return here;
}
void write_flash(int length) {
fill(length);
if (CRC_EOP == getch()) {
SERIAL.print((char) STK_INSYNC);
SERIAL.print((char) write_flash_pages(length));
} else {
error++;
SERIAL.print((char) STK_NOSYNC);
}
}
uint8_t write_flash_pages(int length) {
int x = 0;
unsigned int page = current_page();
while (x < length) {
if (page != current_page()) {
commit(page);
page = current_page();
}
flash(LOW, here, buff[x++]);
flash(HIGH, here, buff[x++]);
here++;
}
commit(page);
return STK_OK;
}
#define EECHUNK (32)
uint8_t write_eeprom(unsigned int length) {
// here is a word address, get the byte address
unsigned int start = here * 2;
unsigned int remaining = length;
if (length > param.eepromsize) {
error++;
return STK_FAILED;
}
while (remaining > EECHUNK) {
write_eeprom_chunk(start, EECHUNK);
start += EECHUNK;
remaining -= EECHUNK;
}
write_eeprom_chunk(start, remaining);
return STK_OK;
}
// write (length) bytes, (start) is a byte address
uint8_t write_eeprom_chunk(unsigned int start, unsigned int length) {
// this writes byte-by-byte, page writing may be faster (4 bytes at a time)
fill(length);
prog_lamp(LOW);
for (unsigned int x = 0; x < length; x++) {
unsigned int addr = start + x;
spi_transaction(0xC0, (addr >> 8) & 0xFF, addr & 0xFF, buff[x]);
delay(45);
}
prog_lamp(HIGH);
return STK_OK;
}
void program_page() {
char result = (char) STK_FAILED;
unsigned int length = 256 * getch();
length += getch();
char memtype = getch();
// flash memory @here, (length) bytes
if (memtype == 'F') {
write_flash(length);
return;
}
if (memtype == 'E') {
result = (char)write_eeprom(length);
if (CRC_EOP == getch()) {
SERIAL.print((char) STK_INSYNC);
SERIAL.print(result);
} else {
error++;
SERIAL.print((char) STK_NOSYNC);
}
return;
}
SERIAL.print((char)STK_FAILED);
return;
}
uint8_t flash_read(uint8_t hilo, unsigned int addr) {
return spi_transaction(0x20 + hilo * 8,
(addr >> 8) & 0xFF,
addr & 0xFF,
0);
}
char flash_read_page(int length) {
for (int x = 0; x < length; x += 2) {
uint8_t low = flash_read(LOW, here);
SERIAL.print((char) low);
uint8_t high = flash_read(HIGH, here);
SERIAL.print((char) high);
here++;
}
return STK_OK;
}
char eeprom_read_page(int length) {
// here again we have a word address
int start = here * 2;
for (int x = 0; x < length; x++) {
int addr = start + x;
uint8_t ee = spi_transaction(0xA0, (addr >> 8) & 0xFF, addr & 0xFF, 0xFF);
SERIAL.print((char) ee);
}
return STK_OK;
}
void read_page() {
char result = (char)STK_FAILED;
int length = 256 * getch();
length += getch();
char memtype = getch();
if (CRC_EOP != getch()) {
error++;
SERIAL.print((char) STK_NOSYNC);
return;
}
SERIAL.print((char) STK_INSYNC);
if (memtype == 'F') result = flash_read_page(length);
if (memtype == 'E') result = eeprom_read_page(length);
SERIAL.print(result);
}
void read_signature() {
if (CRC_EOP != getch()) {
error++;
SERIAL.print((char) STK_NOSYNC);
return;
}
SERIAL.print((char) STK_INSYNC);
uint8_t high = spi_transaction(0x30, 0x00, 0x00, 0x00);
SERIAL.print((char) high);
uint8_t middle = spi_transaction(0x30, 0x00, 0x01, 0x00);
SERIAL.print((char) middle);
uint8_t low = spi_transaction(0x30, 0x00, 0x02, 0x00);
SERIAL.print((char) low);
SERIAL.print((char) STK_OK);
}
//////////////////////////////////////////
//////////////////////////////////////////
////////////////////////////////////
////////////////////////////////////
void avrisp() {
uint8_t ch = getch();
switch (ch) {
case '0': // signon
error = 0;
empty_reply();
break;
case '1':
if (getch() == CRC_EOP) {
SERIAL.print((char) STK_INSYNC);
SERIAL.print("AVR ISP");
SERIAL.print((char) STK_OK);
}
else {
error++;
SERIAL.print((char) STK_NOSYNC);
}
break;
case 'A':
get_version(getch());
break;
case 'B':
fill(20);
set_parameters();
empty_reply();
break;
case 'E': // extended parameters - ignore for now
fill(5);
empty_reply();
break;
case 'P':
if (!pmode)
start_pmode();
empty_reply();
break;
case 'U': // set address (word)
here = getch();
here += 256 * getch();
empty_reply();
break;
case 0x60: //STK_PROG_FLASH
getch(); // low addr
getch(); // high addr
empty_reply();
break;
case 0x61: //STK_PROG_DATA
getch(); // data
empty_reply();
break;
case 0x64: //STK_PROG_PAGE
program_page();
break;
case 0x74: //STK_READ_PAGE 't'
read_page();
break;
case 'V': //0x56
universal();
break;
case 'Q': //0x51
error = 0;
end_pmode();
empty_reply();
break;
case 0x75: //STK_READ_SIGN 'u'
read_signature();
break;
// expecting a command, not CRC_EOP
// this is how we can get back in sync
case CRC_EOP:
error++;
SERIAL.print((char) STK_NOSYNC);
break;
// anything else we will return STK_UNKNOWN
default:
error++;
if (CRC_EOP == getch())
SERIAL.print((char)STK_UNKNOWN);
else
SERIAL.print((char)STK_NOSYNC);
}
}








{kind=link}
Comments
Please log in or sign up to comment.