



Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
We are living in an age where tasks and systems are fusing together with the power of IoT to have a more efficient system of working and to execute jobs quickly! With all the power at our finger tips this is what we have come up with.
The Internet of Things (IoT) shall be able to incorporate transparently and seamlessly a large number of different systems, while providing data for millions of people to use and capitalize. Building a general architecture for the IoT is hence a very complex task, mainly because of the extremely large variety of devices, link layer technologies, and services that may be involved in such a system.One of the main concerns with our environment has been solid waste management which impacts the health and environment of our society. The detection, monitoring and management of wastes is one of the primary problems of the present era. The traditional way of manually monitoring the wastes in waste bins is a cumbersome process and utilizes more human effort, time and cost which can easily be avoided with our present technologies.
This is our solution, a method in which waste management is automated. This is our IoT Garbage Monitoring system, an innovative way that will help to keep the cities clean and healthy.Follow on to see how you could make an impact to help clean your community, home or even surroundings, taking us a step closer to a better way of living : )
Overview of the Monitoring SystemThe idea struck us when we observed that the garbage truck use to go around the town to collect solid waste twice a day. Although this system was thorough it was very inefficient. For example let's say street A is a busy street and we see that the garbage fills up really fast whereas maybe street B even after two days the bin isn't even half full. This example is something that actually happens thus it lead us to the ''Eureka'' moment!
What our system does is it gives a real time indicator of the garbage level in a trashcan at any given time. Using that data we can then optimize waste collection routes and ultimately reduce fuel consumption. It allows trash collectors to plan their daily/weekly pick up schedule.
The basic model works like this: To start with, you will first have to enter the height of the dustbin. This will help us generate the percentage of trash in the trashcan. We then have two criterias which needs to be satisfied to show that the particular bin needs to be emptied :
- The amount of trash, in other words let's say if your bin is half full you don't really need to empty it. Our thresh, or maximum amount that we permit of trash, is 75% of the bin. (You could alter the thresh according to your preference.)
- If supposing a particular trashcan fills up 20% and then for a week doesn't change, it comes into our second criteria, time. With time even the little amount will start rotting leading to a smelly surrounding. To avoid that our tolerance level is 2 days, so if a trashcan is less than 75% but it is two days old it then will also need to be emptied.
With these criterias in mind let's understand the technical part:
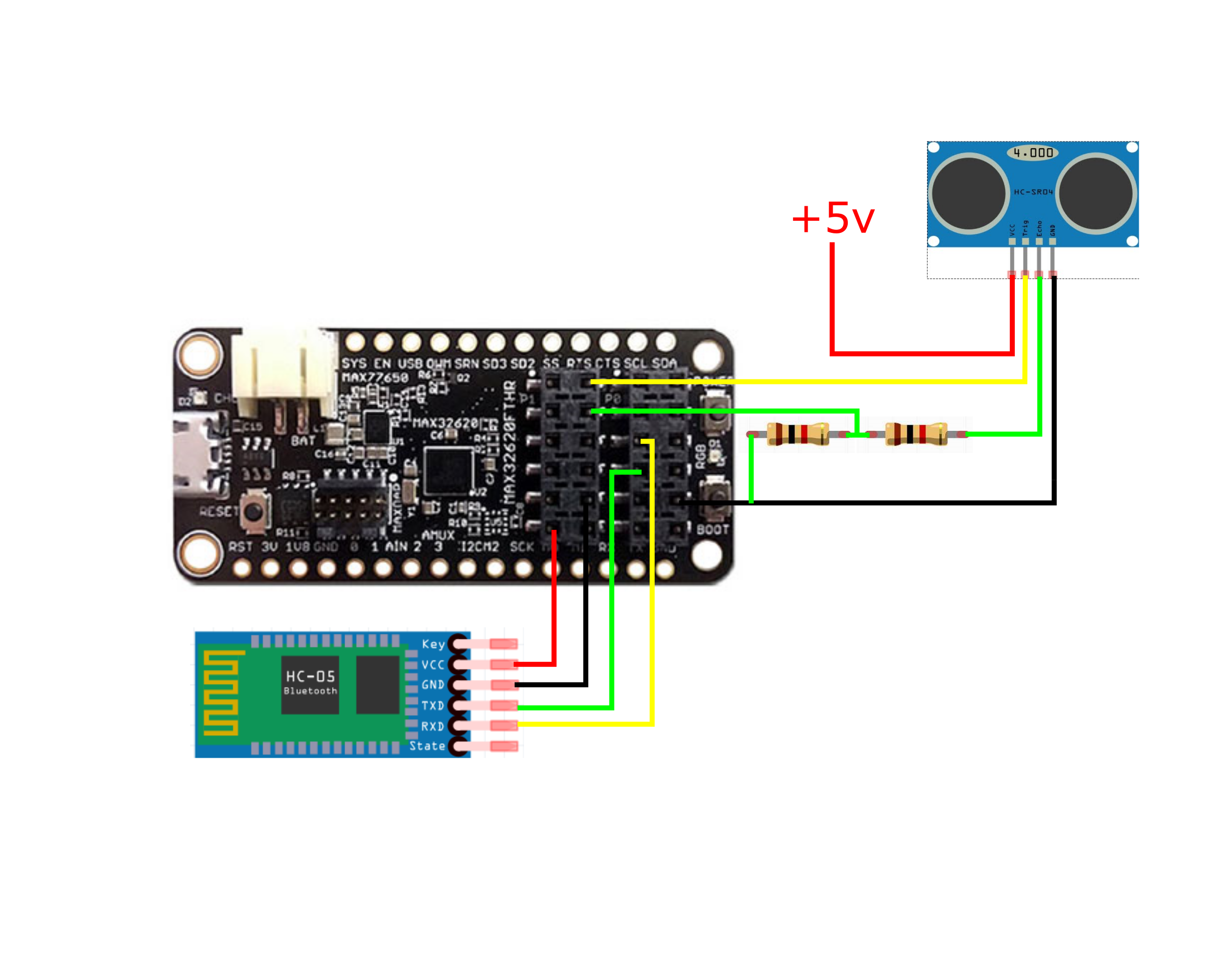
- An ultrasonic sensor (A.K.A a distance sensor) will be placed on the interior side of the lid, the one facing the solid waste. As trash increases, the distance between the ultrasonic and the trash decreases. This live data will be sent to our micro-controller.
- Our micro- controller, the MAX32620FTHR then processes the data and through the help of WiFi sends it to an app.
- What the app does it visually represents the amount of trash in the bin with a small animation.
This process will indicate all the bins which require attention, leading the user to take the most effective route.
We post all of our projects on Instructables, a place that lets you explore, document, and share your DIY creations. You can also subscribe to our YouTube Channel Here. We post lots of in progress photos and have conversation on our Instagram.If you like what we make and wish to support us, do it on Patreon here.For work related inquiries contact us on : technovationrobot@gmail.com
MaterialsHardware:
- Battery ( Gearbest) these batteries will power the Arduino board
- Plastic Container (Gearbest) I found an old plastic container in which all the components could fit. The box is important as you can easily access the components and it's waterproof.
- Ultrasonic Sensor (Gearbest) An ultrasonic sensor measures distance. It will be attached to the lid indicating the quantity of trash. Our system's key component.
- Jumper Wires (Gearbest)
- Bluetooth Module (Amazon) simplifies the task of connecting via bluetooth
- White Spray Paint Turn your regular box into a more professional product
Tools:
- Electric Drill (Gearbest)
- Hot Glue Gun (Gearbest)
Software:
- Arduino IDE
- Blynk An android app that allows communication with WiFi compatible micro-controllers.
Quick word about Gearbest, you can find all products especially for hobbyists. Cheap and good quality highly recommended, do check them out!
Construct the ModelIt's time to make our very own system to test our concept at home on a small scale! Look for an old small plastic container and make sure your components fit.
Now remove the lid and trace the two ''eyes'' of the ultrasonic sensor. this will be the side facing the bottom of the bin.
Take your biggest drill bit, mine was 10mm and drill out the holes. If they still are a bit small lightly file them till the ultrasonic sensor snugly fits in, completely flush to the surface.
We chose white but you could choose whatever colour you prefere apply two coats of paint both inside and out, don't forget the cover. Note: The fumes are toxic do it outside.
Attach the Ultrasonic sensorPush in the sensor and apply dabs of hot glue to secure it in place. Then make a slot for your switch and fit everything into place.The Circuit
Simply mount the Base shield onto the Arduino 101 and attach the Ultrasonic sensor to pin D6
EnclosureCarefully fit all the components in and close the box
I took the house dustbin to test my model.
Cut and stick to pieces of double-sided tape and attach the system to the lid of the dustbin, making sure the sensor is facing downwards.
To connect to the internet we use a prebuilt platform called Blynk, which can be downloaded from the android play store, link below. There are countless examples on how to use the app with the Arduino which are all available by heading to files in the Arduino IDE, then examples and under the Blynk list.Link to blynk app: https://play.google.com/store/apps/details?id=cc.
To be able to program the MAX32620FTHR board, you need to first install the drivers needed. To download the necessary drivers to be able to use MAX32620FTHR, open the Arduino IDE, click on file, preferences, then copy and paste the following link into the box that says: Additional Boards manager URLs.
Then Go to Tools,Board,Boards Manager and search for maxim. In the list there should be one that says Maxim's 32-bit Microcontroller. Finally just Install it.
Once the installation is completed, close the Boards Manager. Go to Tools,Board and select you board from the list. Now, plug in your board and under Tools,Port select the appropriate serial port for your board. Finally go to Tools,Programmer and select DAPLink.
Once your drivers are installed, go ahead and download the libraries needed. For our program to run we need the blynk library and the ultrasonic library, both can be found in Arduino's in built library manager. Open to sketch then include library. then library manager.
Now in the search bar, search for Blynk and Ultrasonic, choose your IDE version and install. (double check with the pictures below)
TestingThen using the Blynk app we made a small representation with 3 Leds of the trash level. Select Generic Board as your micro controller and as ''connection type'' Bluetooth. You will then receive a mail of the "auth token" which you need to input in the code, (mentioned in the code).
Results!Here you have the results of the whole concept finally working! hurray! These are screenshots of my phone as I filled the dustbin. On the blynk application we aligned three LEDs one on top of the other. Green which ranges from 0 to 25% full, Orange from 25 to 65% and Red from 65 to 100%
After having put 10% of trash and closing the bin we have the green LED that comes on the other two stay off.
50% full...
...and finally we put all the trash possible, and all three LEDs and a smile lit up! Congratulations the model works. : )
Step 14: GPSIMPORTANT:We haven't actually implemented this step as we would have had to make at least 20 models to install them around the town's dustbins. This would have become too expensive, so we are putting the idea forward, which when randomly simulated gave us the shortest route, the correct results!
Now is the time consuming part. We plan to fuse our project with Google Maps. This is how:You need to manually go about the town taking GPS locations of each trashcan. Then save it on your Google Maps. Once you have done that, in the same way we made the system in our model intead of one LED you will need to do the same for the number of dustbins there are. Let's say there are 20.
When the truck driver starts his day, he opens Blynk and sees all the dustbins that require attention then he selects each dustbin (each when having their specific number) and then generates the shortest and most efficient route!
Widespread OpportunitiesAfter having made one ourselves we realized how widely this system could be used to turn this rather horrible cumbersome chore into a really efficient one!The way it can impact the city or even a country on a big scale is understandable, and hopefully in the future it is implemented. But other than that each individual can benefit with this concept. A community, an apartment complex or even a house can all use this powerful tool fueled by the internet of things to make their life a whole lot simpler!
Step 16: ComplicationsThat said there are a few complications that we thought would occur if we took this product on a big scale.Challenges :• Ensuring the Ultrasonic distance sensor are correctly placed. If the pile of dump increased in the middle the sensor could be giving misleading data.• There could be liquid/water thrown in to the bin. The design needs to have water proof electronics and embedded software.• The BIGGEST issue availability of 3G/4G Cellular networks. The fact that we made a model at home bypassed this issue as we used WiFi. This in fact is this only main issue, although personally I feel in a couple of years every corner of the world will have Internet Connection
ConclusionThis project on the whole looks promising, but definitely needs small adjustments as mentioned above. Would love to see your versions, or even suggestions or ideas, do drop them in the comment section.Hope you guys enjoyed this project, let's continue working on ideas to impact our lives and environment. As usual like share, and subscribe so that you don't miss our next projects. HAPPY MAKING : )
Popular ProjectsIf you like what we make check out some of our popular uploads!You must see the video the fully appreciate it WATCH the video HERE.
Cubex the Sensor safe. Watch it HERE






{kind=link}
Comments
Please log in or sign up to comment.