Similar to what you might find in a drive-through car wash, this project offers a "stop" light indicator to help people safely park in a tight parking spot or small garage. Space is at a premium these days and that includes parking. Many newer garages and shared parking areas force people to have to park their vehicles in close confines, and the last thing you would want to do is damage you or someone else's vehicle or property. As an example usage for this project, when you enter your garage the LED lights will turn on due to motion that is detected with the use of the PIR sensor. As you continue to pull your vehicle forward the lights will remain on and the ultrasonic sensor mounted to the back wall will begin to measure your distance from the wall. Once you are within your desired range of the wall, the lights will turn red, letting you know to stop. Now you have safely parked your vehicle without worry.
The beauty of this design is that there is more than one application for it. Each sensor can be in a different location from one another and still work effectively. This makes this project not only great for parking and vehicle situations, but can also be used for storage facilities both large and small, moving and arranging furniture, or even be part of a home security system.
Motion Sensors
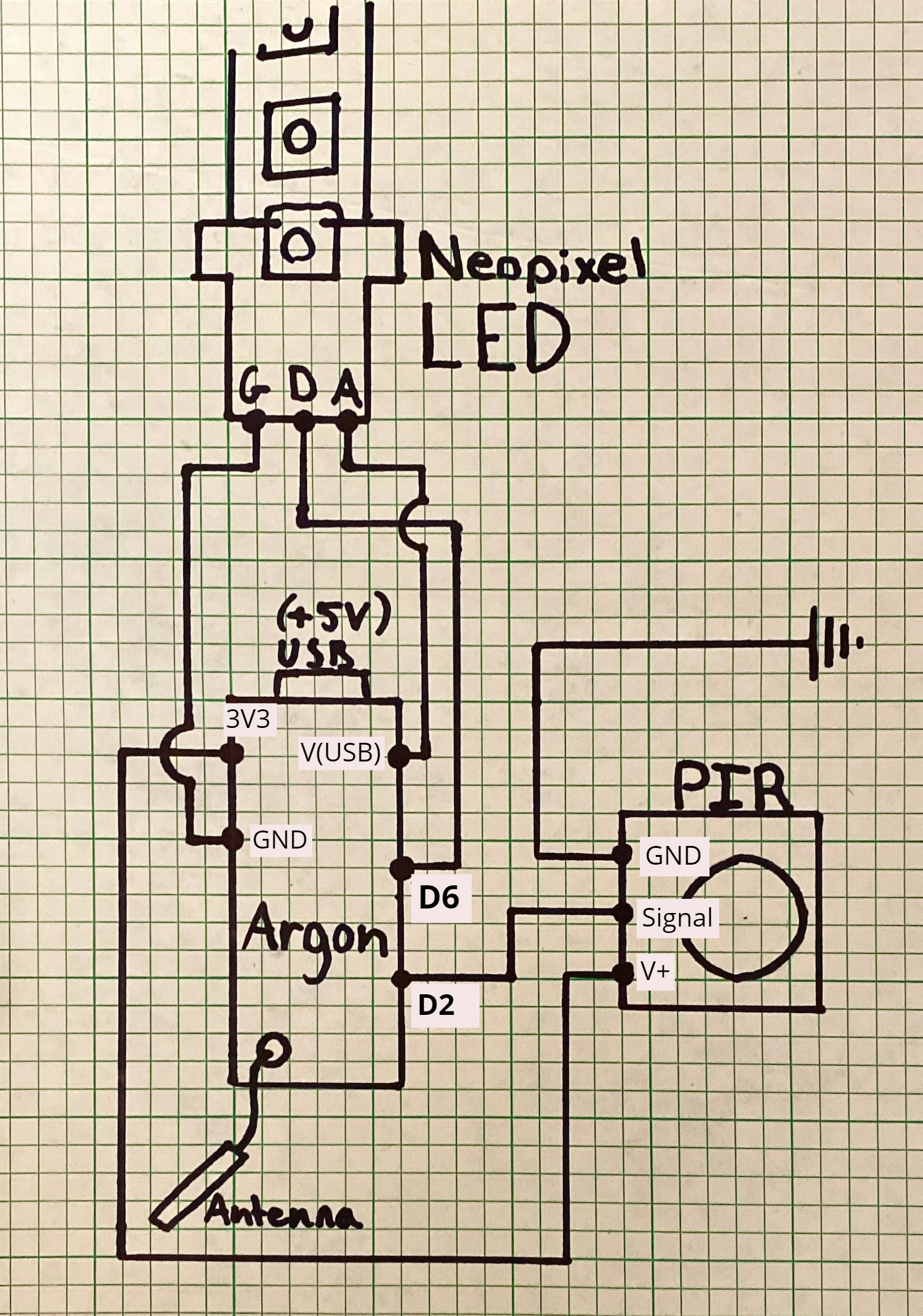
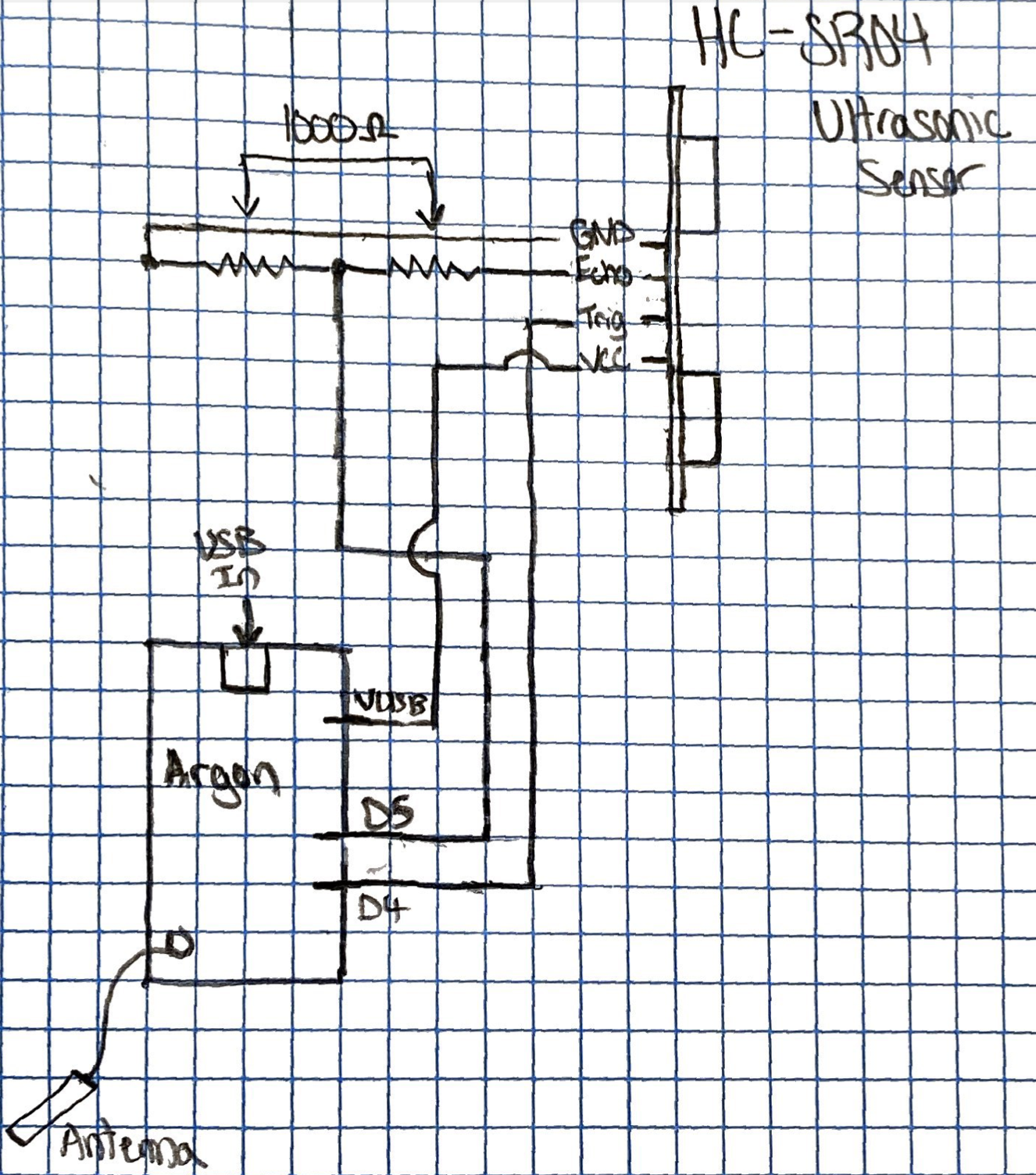
The first image shows the argon circuit with a PIR Sensor and LED light strip. The PIR motion sensor detects motion and turns the led lights on. The second image shows the circuit of the argon with an Ultrasonic sensor connected to it. The ultrasonic sensor picks ups when something comes within 20 cm and it send a signal through the argon and to the cloud. The PIR argon picks up this signal and this will then also turn the light on.
PIR Motion Sensor Circuit
Ultrasonic Sensor Circuit
Data and Graph
The data from our sensors was sent to the cloud through the argon and was processed with the software IFTTT. This sent our data to google sheets and shows when there was motion from PIR Sensor (motion) and when something becomes in range to trip the ultrasonic sensor (tripStatus). When motion was detected a 1 shows on the google sheets and when there is no motion a 0 shows on the google sheets.
Sensor Data
Chart of Data Over Time
Youtube Video
This YouTube video shows a demonstration of the sensors working and turning the lights on.
This code triggers the attached LED to turn on when the PIR motion sensor detects motion.
// This #include statement was automatically added by the Particle IDE.#include<neopixel.h>SYSTEM_MODE(AUTOMATIC);// IMPORTANT: Set pixel COUNT, PIN and TYPE#define PIXEL_PIN D6#define PIXEL_COUNT 30#define PIXEL_TYPE WS2812BAdafruit_NeoPixelstrip(PIXEL_COUNT,PIXEL_PIN,PIXEL_TYPE);intred;intgreen;intblue;intinputPin=D2;intledPin=D6;intval=0;inttrigPin=D4;intechoPin=D5;voidsetup(){pinMode(inputPin,INPUT);pinMode(ledPin,OUTPUT);digitalWrite(ledPin,LOW);strip.begin();pinMode(trigPin,OUTPUT);Particle.subscribe("tripStatus",red2);pinMode(echoPin,INPUT_PULLUP);}voidred2(constchar*event,Stringdata){if(strcmp(data,"1")==0){// if the sensor's threshold is breached, then turn your LED oncolorAll(strip.Color(255,0,0),30);delay(1000);}elseif(strcmp(data,"0")==0){// if your sensor's beam is all clear, turn your board LED offcolorAll(strip.Color(0,0,0),30);delay(1000);}}voidloop(){val=digitalRead(inputPin);if(val==LOW){colorAll(strip.Color(0,0,0),30);Particle.publish("motion","0");delay(1000);}elseif(val==HIGH){Particle.publish("motion","1");colorAll(strip.Color(0,255,0),30);delay(6000);}delay(1000);}voidcolorAll(uint32_tc,uint8_twait){uint16_ti;for(i=0;i<strip.numPixels();i++){strip.setPixelColor(i,c);}strip.show();delay(wait);}
Argon 2 (Ultrasonic Sensor Code)
C/C++
This code establishes the parameters for the ultrasonic sensor and sends the data received from the ultrasonic sensor to the cloud, which is received by Argon 1 to control the "stop" function of the LED. Both sets of data are recorded and published to the Particle app as an event. The events recorded from this code are used to plot the light on/off data in a google sheet.
// This #include statement was automatically added by the Particle IDE.#include<HC_SR04.h>doublecm=0.0;boolbeam_status=false;inttrigPin=D4;intechoPin=D5;intinputPin=D2;intledPin=D6;intval=0;HC_SR04rangefinder=HC_SR04(trigPin,echoPin);voidsetup(){pinMode(inputPin,INPUT);pinMode(ledPin,OUTPUT);digitalWrite(ledPin,LOW);pinMode(inputPin,OUTPUT);Particle.subscribe("motion",0);pinMode(ledPin,INPUT_PULLUP);Spark.variable("cm",&cm,DOUBLE);}voidloop(){cm=rangefinder.getDistanceCM();if(cm<30){if(beam_status==false){Particle.publish("tripStatus","1");beam_status=true;}}else{if(beam_status==false){}else{Particle.publish("tripStatus","0");beam_status=false;}}delay(100);}




_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)


















{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.