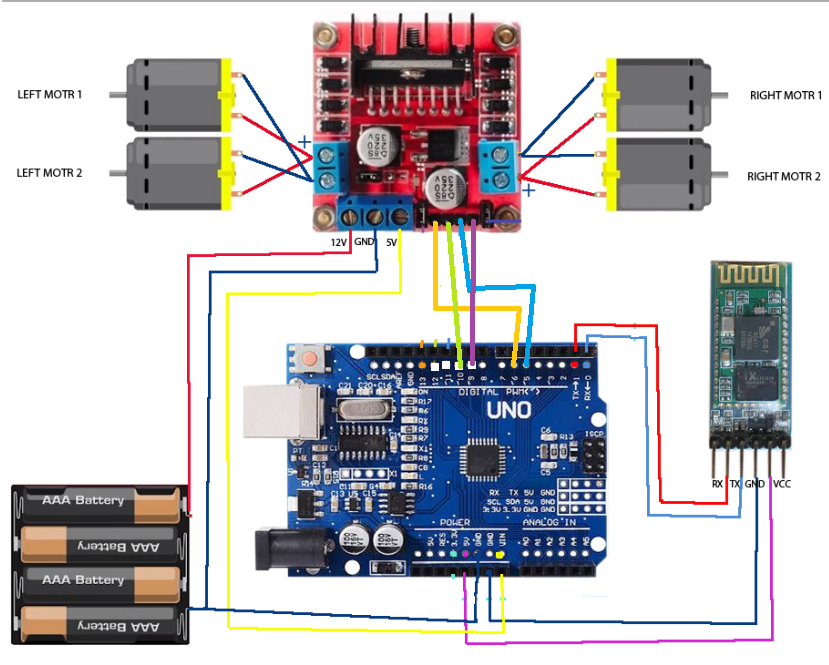
const int motorA1 = 5; // L298N'in IN3 Girişi
const int motorA2 = 6; // L298N'in IN1 Girişi
const int motorB1 = 10; // L298N'in IN2 Girişi
const int motorB2 = 9; // L298N'in IN4 Girişi
int i=0;
int j=0;
int state;
int vSpeed=255;
void setup() {
pinMode(motorA1, OUTPUT);
pinMode(motorA2, OUTPUT);
pinMode(motorB1, OUTPUT);
pinMode(motorB2, OUTPUT);
Serial.begin(9600);
}
void loop() {
if(Serial.available() > 0){
state = Serial.read();
}
if (state == '0'){
vSpeed=0;}
else if (state == '1'){
vSpeed=100;}
else if (state == '2'){
vSpeed=180;}
else if (state == '3'){
vSpeed=200;}
else if (state == '4'){
vSpeed=255;}
if (state == 'F') {
analogWrite(motorA1, vSpeed); analogWrite(motorA2, 0);
analogWrite(motorB1, vSpeed); analogWrite(motorB2, 0);
}
else if (state == 'G') {
analogWrite(motorA1,vSpeed ); analogWrite(motorA2, 0);
analogWrite(motorB1, 100); analogWrite(motorB2, 0);
}
else if (state == 'I') {
analogWrite(motorA1, 100); analogWrite(motorA2, 0);
analogWrite(motorB1, vSpeed); analogWrite(motorB2, 0);
}
else if (state == 'B') {
analogWrite(motorA1, 0); analogWrite(motorA2, vSpeed);
analogWrite(motorB1, 0); analogWrite(motorB2, vSpeed);
}
else if (state == 'H') {
analogWrite(motorA1, 0); analogWrite(motorA2, 100);
analogWrite(motorB1, 0); analogWrite(motorB2, vSpeed);
}
else if (state == 'J') {
analogWrite(motorA1, 0); analogWrite(motorA2, vSpeed);
analogWrite(motorB1, 0); analogWrite(motorB2, 100);
}
else if (state == 'L') {
analogWrite(motorA1, vSpeed); analogWrite(motorA2, 150);
analogWrite(motorB1, 0); analogWrite(motorB2, 0);
}
else if (state == 'R') {
analogWrite(motorA1, 0); analogWrite(motorA2, 0);
analogWrite(motorB1, vSpeed); analogWrite(motorB2, 150);
}
else if (state == 'S'){
analogWrite(motorA1, 0); analogWrite(motorA2, 0);
analogWrite(motorB1, 0); analogWrite(motorB2, 0);
}
}








_P9oQNHLEPS.jpeg)
_LqphQcB1Mt.jpeg)







_P9oQNHLEPS.jpeg){kind=link}
_LqphQcB1Mt.jpeg){kind=link}
{kind=link}
Comments
Please log in or sign up to comment.