



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 2 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 2 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
| ||||||
In a previous article we saw the guys from ITS New Technologies for Life dealing with a radio-controlled car via the Web. Today we will get to know another ITS working group, made up of Sara Defilippis, Silvia Magrì and Pietro Manenti ( in alphabetical order). As a final exam in the electronics course, the group presented another radio-controlled system, a wheeled boat. In addition to the classic electronic and software management problems, the project also involves some peculiar characteristics (buoyancy, maneuverability, resistance of the vehicle, waterproofing) which make it interesting for publication.
Let's give them the floor.
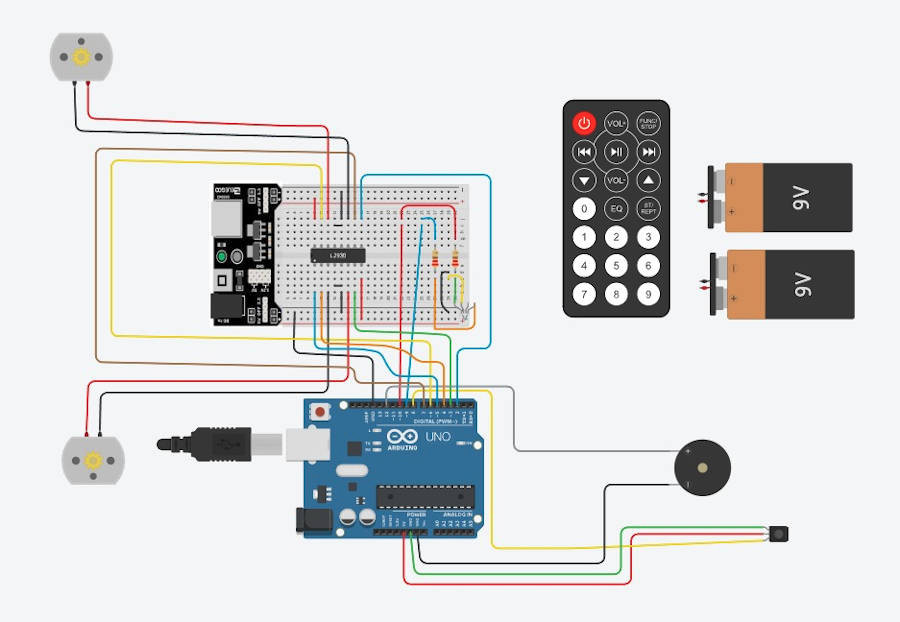
Initial ideaThe initial project consists of the idealization of a boat that is capable of floating, with the possibility of being able to coordinate and control its movements, the switching on of an RGB LED and the activation and deactivation of an active buzzer through the use of an IR remote control.
- physical circuit: Silvia Magrì
- assembly: Pietro Manenti
- digital circuit (tinkercad): Silvia Magrì
- programming: Silvia Magrì and Pietro Manenti
- boat construction: Pietro Manenti
- report: Sara Defilippis
- decoration: Sara Defilippis
- testing: Pietro Manenti, Sara Defilippis and Silvia Magrì
The approach
To carry out the project, we looked for an idea that could best reflect the desire to test oneself while at the same time choosing a project suitable for beginners. Modifications were therefore developed on the circuit and on the code, ultimately leaving room for aesthetics as well.
The project
The software is available here.
AssemblyA polystyrene parallelepiped was taken, which was cut into the shape of a boat with a knife; subsequently a series of holes were cut inside, into which the motors and batteries were inserted.
The circuit was placed above the hull, covered by the ice cream tray to obtain greater circuit protection and better aesthetics.
To fix the receiver in a position to receive the signal, it was necessary to fix an iron rod to the hull, to which we attached a pink fabric sail using a spray can.
The plastic tray was then fixed to the hull using wire; it was cut to obtain a satisfactory aesthetic result.
We have carved the structure to show the LED at the top of the tray.
Finally, the blades were printed in 3D (in PLA) using the Ender 3 printer.
Various difficulties were encountered in the implementation of the project.
- Search for an idea for the project to be implemented in line with initial knowledge - Many projects initially appeared interesting, but upon subsequent analysis they turned out to be too complex for the level of knowledge gained by the group in the short space of the course -
- Programming the various cycles of the code (RGB LED) - Although managing the individual sensors/actuators is trivial, adding more components to the project increases its complexity exponentially.
- Remote control range - The IR remote control, although equipped with a "debouncing" system for pressing the buttons, has a decidedly limited range of action. For this reason, the next version of the system involves the use of a steering system through web services connected via wi-fi to a cloud.
- Circuit composition (H bridge with the pair of engines) - We had to learn to manage the functions (and activation times) of a paddle engine in water, study the power necessary to make the vessel move and curve without causing hydrofoil effects.
- 3D printing (printing time) - Printing times for the blades were always higher than expected, both due to their complexity and to the waiting queue. Furthermore, we had to test different shovel models with different curvatures, which would allow advancement without affecting too much the power required.
- Physical assembly of the boat (cable management) - Contrary to usual, the boat had to function in water: we therefore had to provide a waterproofing and protection system for the electrical circuits.
For version 2.0 of the project it was decided to improve the skeleton of the boat by making it more waterproof, faster and lighter, by installing more powerful engines and even more efficient blades. Furthermore, it was decided to make it an amphibious vehicle, installing blades with different shapes and wheels to reduce friction with the ground.
Final thoughtsConsidering that the group had no previous knowledge of electronics and Arduino, and had just finished the Harvard CS50 course (introduction to programming), the results were pleasantly positive: the boys and girls learned to work in groups, dividing tasks and responsibilities, organizing the work into parallelizable modules and carrying out in-depth Quality Assurance work before the delivery of the prototype. The choice of reusable materials shows attention towards green making, and the organization enabled them to deliver the finished and functioning prototype within the required deadline.
Not only increased capabilities in terms of Software and Electronics, therefore, but also a whole series of skills that will come in handy once they enter the world of work.
Well done!




_t9PF3orMPd.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)

_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.