Basic conceptI found an interesting camera module called Pixy2. It can learn to detect objects with distinct color or specific barcode. And I just got a car kit. So I decided to use the pixy camera and the car to build an auto pilot system. But obviously, a simple one.
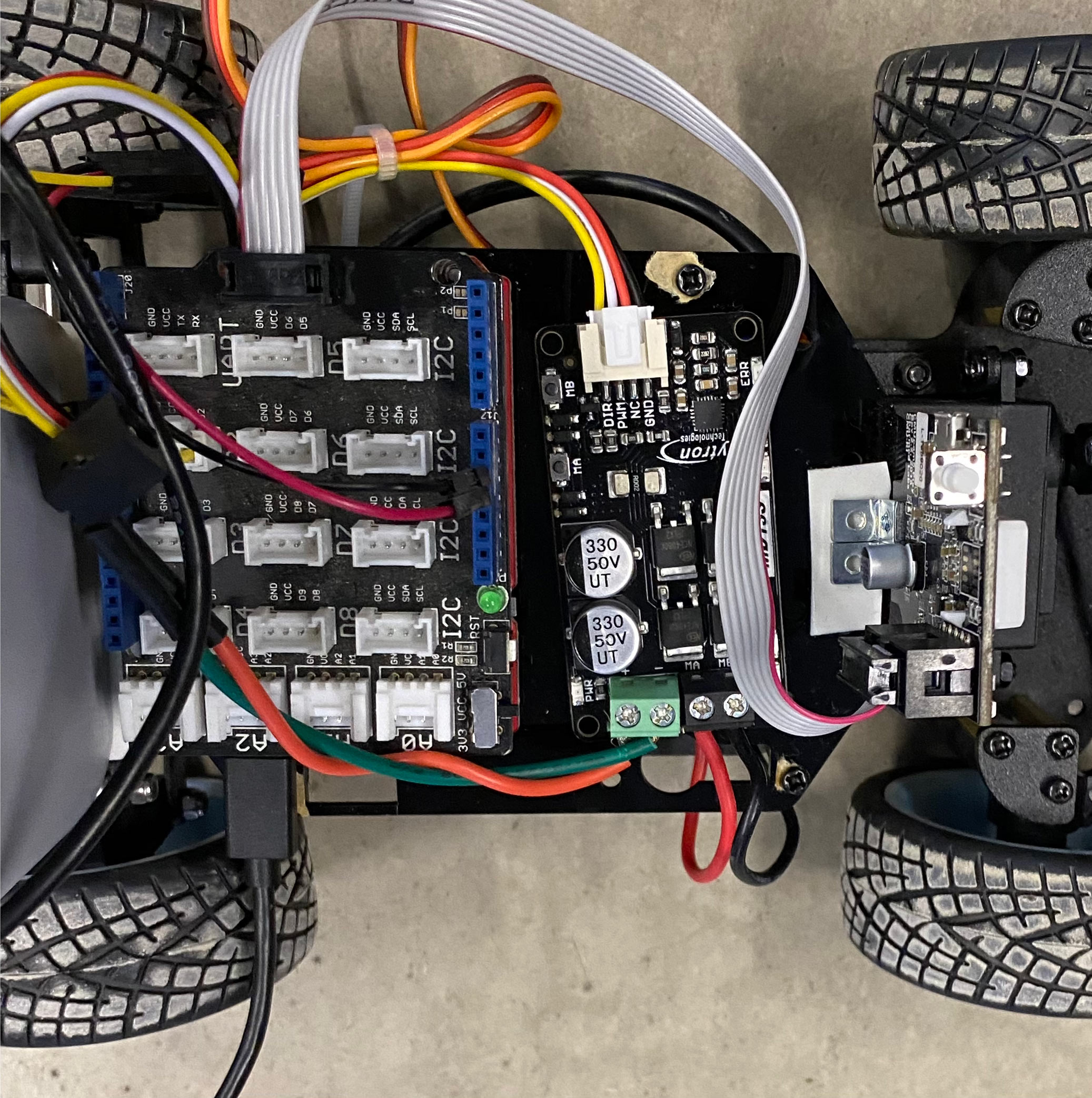
Step 1: Get yourself a car kit and a motor driverI’m using a robot car kit made by Seeed Studio. A servo and a DC motor are integrated onto the car. After you received your purchase, follow the installation guide to assemble the car. Then connect it to a motor driver and a power supply. Give it a test and see if the motor and wheels work well.
Step 2: Test your Pixy 2 cameraConnect the camera to your computer via USB port. Download PixyMon, install and launch it. Then you’ll see the video captured from your Pixy2.
Step 3: Test and make your road signsAs Pixy2 can detect built-in barcode, you can put different barcodes under different road signs.
All available barcodes can be found here.
Step 4: ProgrammingProgram your car so it can react accordingly to the road sign it detected. Here I provide you with my arduino code. If you are using the same car kit as me, just upload the code to your Arduino board and connect the camera to the board.
Step 5: Train your car with more road signs












{kind=link}
Comments