

Hardware components | ||||||
_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 15 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
We all live busy lives, and sometimes our schedules prevent us from feeding our pets. The last thing any pet owner would want is for their beloved furry companion to be stuck without food. With our pet feeder, you won’t ever have to worry about your furry friend going hungry.
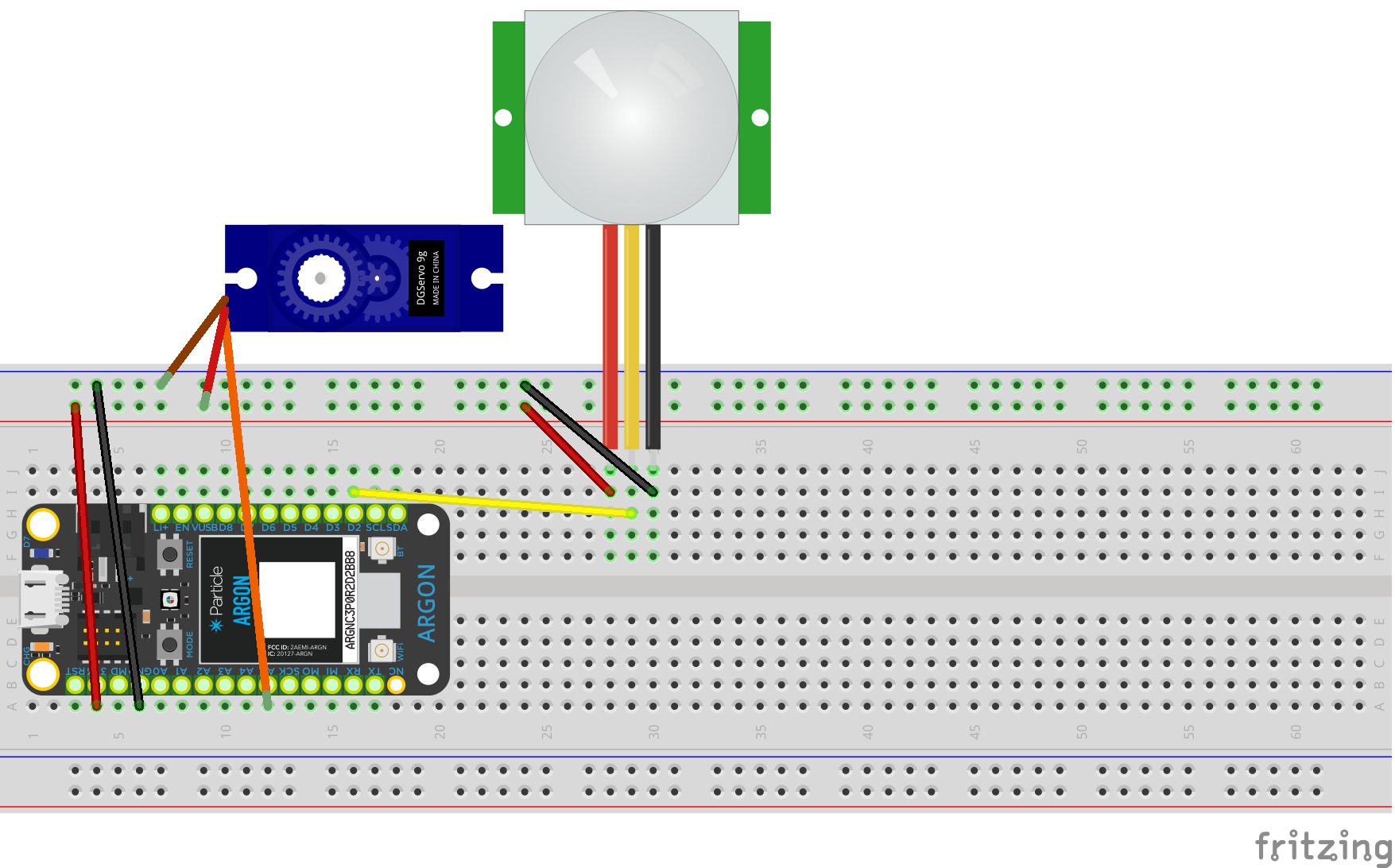
Our automated pet feeder implements a motion sensor and remote control to activate the dispenser anywhere in the world! Even if you forget to feed your pet, they can go up to the feeder and it will dispense treats.
A servo motor is used to rotate the drum, allowing food to fall into the bowl. A PIR sensor module is used for motion detection. The amount of times this sensor can be triggered is limited per hour to ensure adequate proportions. A button switch is also connected to the feeder, which can be activated with no limit.
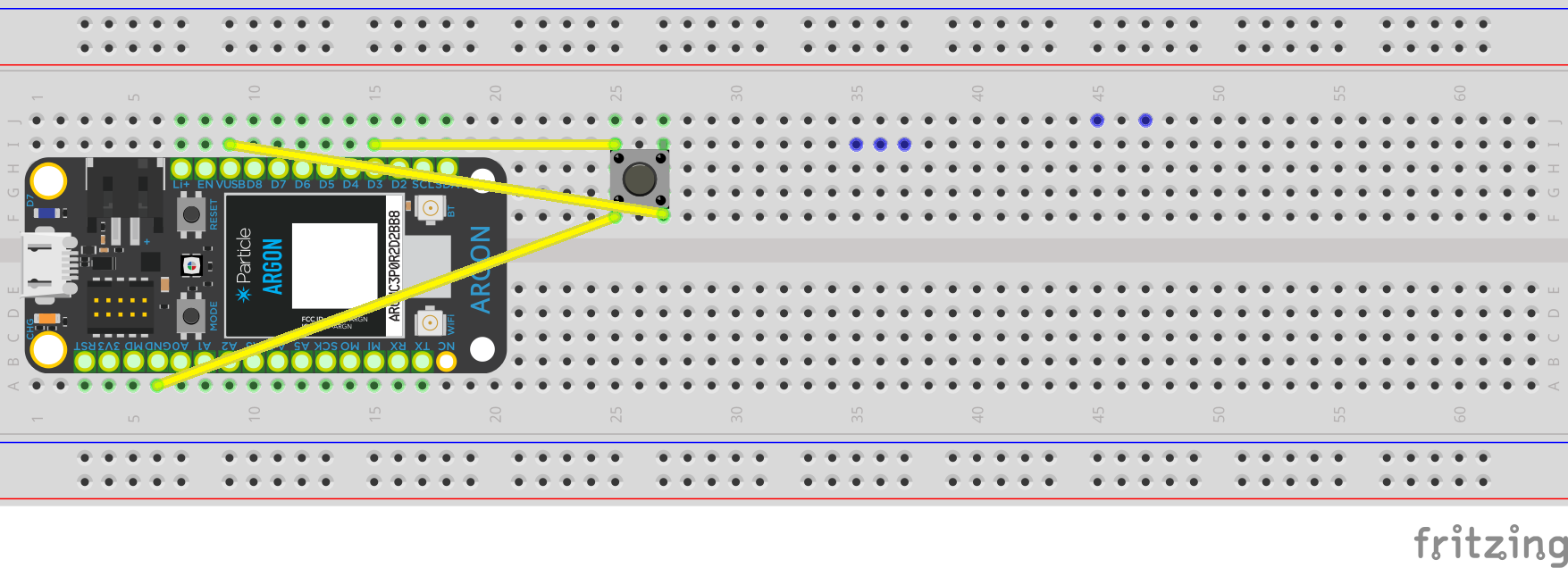
This remote control makes use of a button switch when clicked will activate the dispenser. There is no limit on the number of times this button can be used as it relies on human decisions.
The rotating drum is connected to a custom D shaft with servo mounts. The bushings that the drum lies on have been lubricated and other sources of friction have been minimized.
This motion sensor can be extremely sensitive, hence it is placed behind the feeder to prevent any random movements from triggering the feeder. The sensor can be tuned to further reduce the activation distance.
The remote sends a count to Thingspeak in order to display the number of times the feeder was used. This count is also used by the motion sensor.
This is the counter for the food dispenser.











{kind=link}
{kind=link}
Comments