



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 4 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
| ||||||
Want to know more about this Project
Visit my website link below
https://www.electronicsisfun08.in/2022/12/how-to-make-long-range-android.html
Hello Friends..
I made a Mobile Phone Controlled Car.
I have designed the Android Mobile Application.
This car can be controlled by mobile application.
It is a project which can be used by Engineering students or school going students to show it to their teachers.
If you like this project respect it.
Give me suggestions so I can improve it or any feedback you want to give to my YouTube channel.
link is : https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g
Also you can give me suggestions on "What I made next project.?"
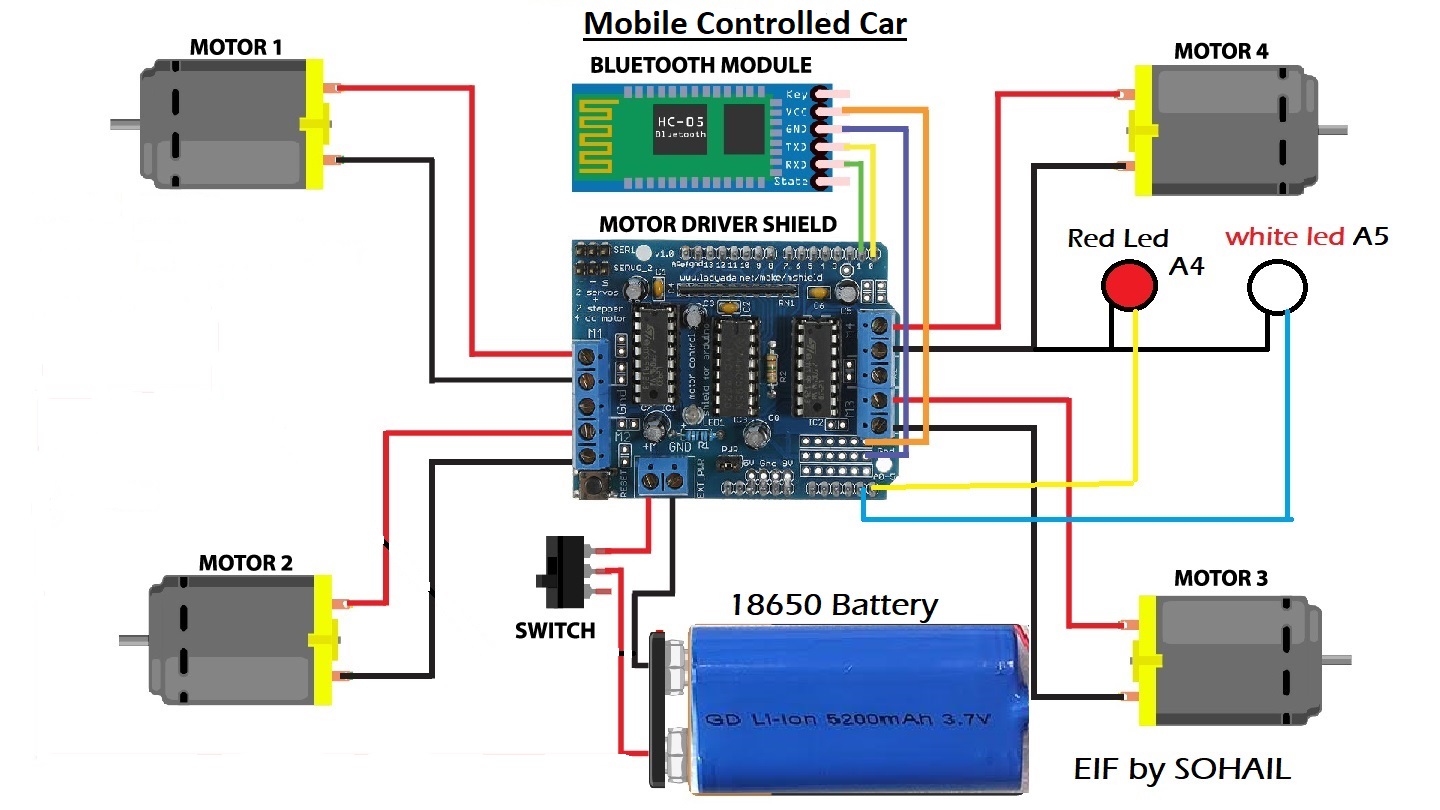
Steps to make this project
1. Gather Components.
2. Place motors on acrylic sheet & then place wheels.
3. Place Arduino and L293D motor driver module on the car.
4. Stick back red lights and front white headlights.
5. Stick Bluetooth module on the car.
6. Do upload the code.
7. Then make connections from circuit diagram.
8. Take Android device, download the app from given link, then install it.
9. Open Bluetooth module, connect HC-05 module, password will be 0000 or 1234.
10. Switch On the car, Now open app and connect the HC-05 module and move it with the help of buttons.
Your Project is ready..
Download Mobile Application : https://drive.google.com/file/d/1733wgAgGncZI_EUYwARYVEgmNIOC_0EB/view?usp=sharing
Your project is ready..
Visit my YouTube channel once and see more interesting projects.
"Electronics is Fun"
If you like my channel subscribe it please.
link: https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g




{kind=link}
Comments