


Hardware components | ||||||
_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 2 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 2 | ||||
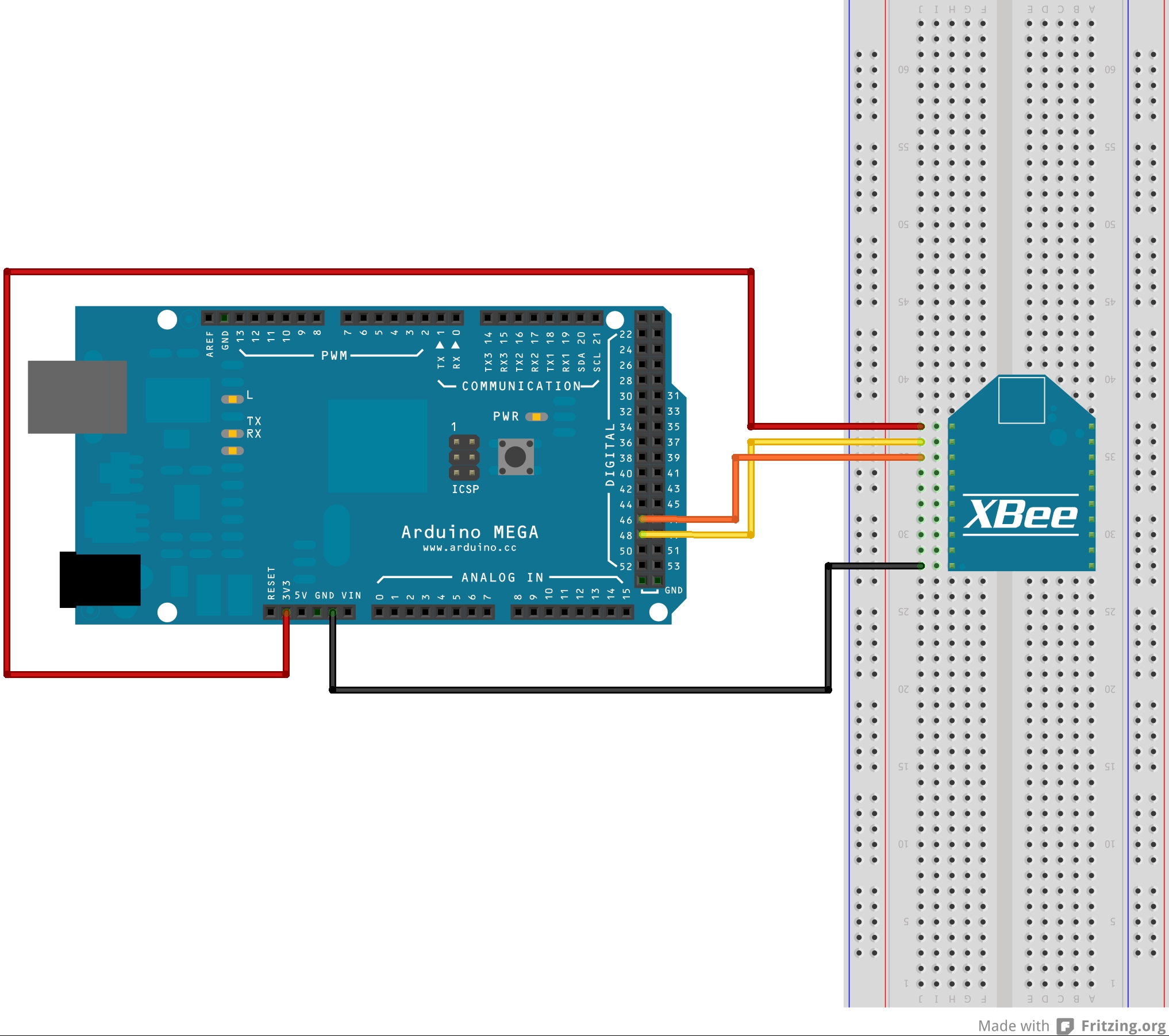
Our project see the control of various flight data recorded by a smartphone and transmitted in real-time to your pc, like accelerometer sensor, gps position,noise drone, orientation, gyroscope and more.
We use two Arduino for data control,one mounted to the drone, and one to the computer, two xBee to communicate remote data of the 1sheeld to your pc.
A fun and easy way to take advantage of all the features and sensors of the smartphone, and also to take some nice pictures ;)
Master Code
C/C++This code is loaded on arduino that is connects to the PC, to control the Arduino on drone
first you need to download library https://www.pjrc.com/teensy/td_libs_AltSoftSerial.html
first you need to download library https://www.pjrc.com/teensy/td_libs_AltSoftSerial.html
#include <AltSoftSerial.h>
int verifica=0;
AltSoftSerial xBee;
char c;
char h;
char stop='s';
void setup() {
Serial.begin(115200);
Serial.println("Master OK");
Serial.println();
Serial.println("Digit for:");
Serial.println("'o' orientation sensor value");
Serial.println("'a' acceleration sensor value");
Serial.println("'b' brightness sensor value");
Serial.println("'g' GPS position");
Serial.println("'m' microfone noise");
Serial.println("'p' take a picture");
xBee.begin(9600);
}
void loop() {
Serial.flush();
if (Serial.available()>0) {
c = Serial.read();
if(c=='o'||c=='a'||c=='m'||c=='g'||c=='b'||c=='p'){
//----------Orientament-----------------------------------------
if(c=='o'){
Serial.println("Orientament");
c='1';
xBee.print(c);
for(int i=0; i<10;i++){
delay(20);
c='o';
xBee.print(c);
do{
h=0;
h=xBee.read();
Serial.print(h);
}
while(xBee.available()>0);
delay(100);
i=i-1;
if(Serial.available()>0);
if(stop==Serial.read()){
Serial.println("Analysis Stopped");
c='0';
Serial.println();
Serial.println("Digit for:");
Serial.println("'o' orientation sensor value");
Serial.println("'a' acceleration sensor value");
Serial.println("'b' brightness sensor value");
Serial.println("'g' GPS position");
Serial.println("'m' microfone noise");
Serial.println("'p' take a picture");
xBee.print(c);
i=11;
}
}
}
//----------Acceleration-----------------------------------------
if(c=='a'){
Serial.println("Acceleration");
c='2';
xBee.print(c);
for(int i=0; i<10;i++){
delay(20);
c='a';
xBee.print(c);
do{
h=0;
h=xBee.read();
Serial.print(h);
}
while(xBee.available()>0);
delay(100);
i=i-1;
if(Serial.available()>0);
if(stop==Serial.read()){
Serial.println("Analysis Stopped");
c='0';
Serial.println();
Serial.println("Digit for:");
Serial.println("'o' orientation sensor value");
Serial.println("'a' acceleration sensor value");
Serial.println("'b' brightness sensor value");
Serial.println("'g' GPS position");
Serial.println("'m' microfone noise");
Serial.println("'p' take a picture");
xBee.print(c);
i=11;
}
}
}
//----------Brightness----------------------------------------
if(c=='b'){
Serial.println("Brightness");
c='3';
xBee.print(c);
for(int i=0; i<10;i++){
delay(20);
c='b';
xBee.print(c);
do{
h=0;
h=xBee.read();
Serial.print(h);
}
while(xBee.available()>0);
delay(50);
i=i-1;
if(Serial.available()>0);
if(stop==Serial.read()){
Serial.println("Analysis Stopped");
c='0';
Serial.println();
Serial.println("Digit for:");
Serial.println("'o' orientation sensor value");
Serial.println("'a' acceleration sensor value");
Serial.println("'b' brightness sensor value");
Serial.println("'g' GPS position");
Serial.println("'m' microfone noise");
Serial.println("'p' take a picture");
xBee.print(c);
i=11;
}
}
}
//----------GPS-----------------------------------------
if(c=='g'){
Serial.println("Posizione GPS'");
c='4';
xBee.print(c);
for(int i=0; i<10;i++){
delay(20);
c='g';
xBee.print(c);
do{
h=0;
h=xBee.read();
Serial.print(h);
}
while(xBee.available()>0);
delay(500);
i=i-1;
if(Serial.available()>0);
if(stop==Serial.read()){
Serial.println("Analysis Stopped");
c='0';
Serial.println();
Serial.println("Digit for:");
Serial.println("'o' orientation sensor value");
Serial.println("'a' acceleration sensor value");
Serial.println("'b' brightness sensor value");
Serial.println("'g' GPS position");
Serial.println("'m' microfone noise");
Serial.println("'p' take a picture");
xBee.print(c);
i=11;
}
}
}
//----------MICROFONO-----------------------------------------
if(c=='m'){
Serial.println("Microphone");
c='5';
xBee.print(c);
for(int i=0; i<10;i++){
delay(20);
c='m';
xBee.print(c);
do{
h=0;
h=xBee.read();
Serial.print(h);
}
while(xBee.available()>0);
delay(100);
i=i-1;
if(Serial.available()>0);
if(stop==Serial.read()){
Serial.println("Analysis Stopped");
c='0';
Serial.println();
Serial.println("Digit for:");
Serial.println("'o' orientation sensor value");
Serial.println("'a' acceleration sensor value");
Serial.println("'b' brightness sensor value");
Serial.println("'g' GPS position");
Serial.println("'m' microfone noise");
Serial.println("'p' take a picture");
xBee.print(c);
i=11;
}
}
}
//----------PICTURES-----------------------------------------
if(c=='p'){
Serial.println("Take a pictures");
c='6';
xBee.print(c);
delay(20);
c='p';
Serial.println();
Serial.println("Digit for:");
Serial.println("'o' orientation sensor value");
Serial.println("'a' acceleration sensor value");
Serial.println("'b' brightness sensor value");
Serial.println("'g' GPS position");
Serial.println("'m' microfone noise");
Serial.println("'p' take a picture");
xBee.print(c);
}
}
}
}
Slave
C/C++This code is loaded sull'arduino that mounts on the drone, which will provide the data to the drone to the ground
first you need to download library https://www.pjrc.com/teensy/td_libs_AltSoftSerial.html
and http://1sheeld.com/downloads/
first you need to download library https://www.pjrc.com/teensy/td_libs_AltSoftSerial.html
and http://1sheeld.com/downloads/
#include <OneSheeld.h>
#include<AltSoftSerial.h>
char variabile;
AltSoftSerial xBee;
char master;
int voce=0;
void setup(){
Serial.begin(115200);
Serial.println("Slave ok");
OneSheeld.begin();
xBee.begin(9600);
}
void loop(){
receiveEvent();
requestEvent();
}
void receiveEvent(){
while(xBee.available()>0){
master=xBee.read();
variabile=master;
}
}
void requestEvent(){
if(variabile=='o'){
xBee.print("Asse x: ");
xBee.print(OrientationSensor.getX());
xBee.print(" Asse y: ");
xBee.print(OrientationSensor.getY());
xBee.print(" Asse z: ");
xBee.println(OrientationSensor.getZ());
variabile=0;
}
if(variabile=='a'){
xBee.print("Asse x: ");
xBee.print(AccelerometerSensor.getX());
xBee.print(" Asse y: ");
xBee.print(AccelerometerSensor.getX());
xBee.print(" Asse z: ");
xBee.println(AccelerometerSensor.getX());
variabile=0;
}
if(variabile=='g'){
xBee.print("Longitudine: ");
xBee.print(GPS.getLongitude());
xBee.print(" Latitudine;: ");
xBee.println(GPS.getLatitude());
variabile=0;
}
if(variabile=='m'){
xBee.print("db: ");
xBee.println(Mic.getValue());
variabile=0;
}
if(variabile=='b'){
xBee.print("Lumen: ");
xBee.println(LightSensor.getValue());
variabile=0;
}
if(variabile=='p'){
Camera.setFlash(ON);
Camera.rearCapture();
xBee.println("Pictures taken");
variabile=0;
}
if(variabile=='1'){
TextToSpeech.say("analysis orientation");
variabile=0;
}
if(variabile=='2'){
TextToSpeech.say("analysis acceleration ");
variabile=0;
}
if(variabile=='3'){
TextToSpeech.say("analysis brightness intensity");
variabile=0;
}
if(variabile=='4'){
TextToSpeech.say("analysis GPS position");
variabile=0;
}
if(variabile=='5'){
TextToSpeech.say("analysis decibel noise");
variabile=0;
}
if(variabile=='6'){
TextToSpeech.say("Taking a picture");
variabile=0;
}
if(variabile=='0'){
TextToSpeech.say("analysis stopped");
variabile=0;
}
}





{kind=link}
Comments